The holidays are approaching fast and the time for making Christmas candy has come for a lot of us. At home many people are making different kinds of fudge, gingerbread cookies, saffron buns and maybe even marzipan treats. Perhaps also dipping a thing or two in chocolate. And who doesn’t love chocolate, right? Here at Volupe we wanted to celebrate this time of year by giving a chocolaty bath to an old friend of ours – the rubber duck. This time dressed up as Santa Claus.
The chocolate bath
You guessed it. Since we at Volupe specialize in engineering simulations we are obviously talking about a virtual kind of chocolate bath. More specifically, we will run rubber duck Santa through a dipping tank filled with molten chocolate, using an overset interface along with a pre-defined trajectory motion. The multiphase physics are treated using a Volume Of Fluid (VOF) approach. The whole simulation setup is basically a tweak on a Simcenter STAR-CCM+ tutorial covering trajectory motion and overset interfaces. The curious reader may refer to the user guide for details on how to setup this type of simulation (https://docs.sw.siemens.com/documentation/external/PL20230724207774020/en-US/userManual/starccmp_userguide_html/STARCCMP/GUID-BC6C464F-52B6-49C8-8C6D-0C1A88A44104.html). The tutorial covers the paint dipping process of a metal chassis.
Apart from replacing the metal chassis with a rubber duck, the paint is also replaced by molten dark chocolate (70% cocoa for the connoisseur to know).
Below is an overview of the simulation domain, with a turquoise dotted line indicating the trajectory moving from right to left. The blue box surrounding the rubber duck is the overset domain.

The tank is filled with chocolate to about a third of the total domain height and the picture below shows the initial state of the simulation.

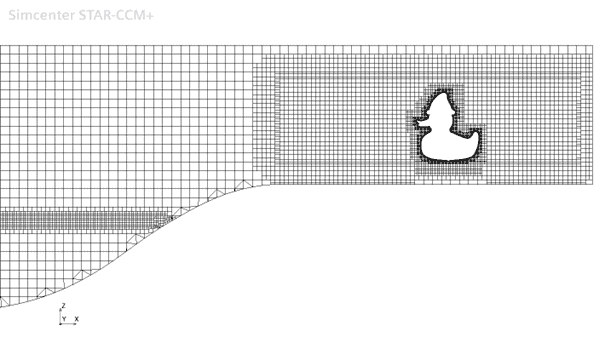
As mentioned previously, the interaction between the moving duck and the surrounding is handled by an overset interface. The picture below shows the initial state of the mesh, showing both the background mesh and the overset mesh. The simulation also involves adaptive mesh refinements, meaning that the mesh will be updated as the solution progresses.
Now we’re all set to give our rubber duck a nice chocolate coating and the finalized dipping sequence can be seen in the animation below.
With that we would like to wish you a great ending to the year and a happy holiday season from us at Volupe! And as always you are welcome to send in any questions or comments to support@volupe.com. The support inbox will be available also throughout the holidays.
Author

Johan Bernander, M.Sc.
support@volupe.com
+46 702 95 18 31