The new optimization technique, called Gradient Based Optimization, will allow you to find a local maximum or minimum for your study in a reduced amount of time compared to evolutionary base optimization algorithms. This new study is an optimum search procedure based on the gradients (sensitivities) of:
- Sensitivities with respect to the cost function, coming from an adjoint computation
- CAD Sensitivities, computed for any parametrized geometry.
Simcenter STAR-CCM+ computes the parametric gradients for each geometric parameter. This is based on the geometric sensitivity of the parameter and the adjoint surface sensitivity of the entire geometry with regard to the optimization objective . The Adjoint solver, a parametric CAD model in 3D-CAD and the surface mesher Geometric Sensitivity are therefore a requirement.
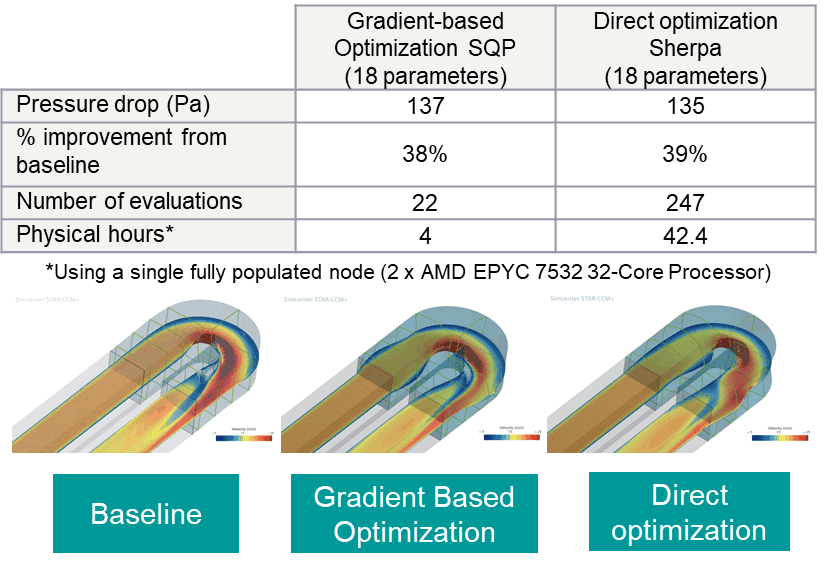
The results below on a U-Bend case show that we found a local minimum for pressure drop reduction by 38% in only 22 evaluations. This compares well with results from Banovic et al. which published a reduction of 18% in 25 steps, using another Gradient Based Optimization algorithm. This illustrates the ability of this method to find a local optimal with few designs for many parameters (18 in this case).
In contrast to the conventional utilization of the Adjoint solver, this approach leaves you in control over the resulting surface. Leading to a smoother surface which will ensure that you are well within your design constrains as well as end up with a design suitable for manufacturing.
Surface Sensitivity
Surface sensitivity analysis permits you to precisely measure how alterations to a part’s surface affect a specific objective. Cells with notable surface sensitivity values exert a significant influence on the cost function. The surface sensitivity is computed using the spring analogy deformation method. The basic idea is to map the mesh as a system of point objects connected by springs. The dynamical system is then solved for its equilibrium configuration. With this approach, events can be translated back to a mesh that yields an improved cost function. However, the method is not used to deform the mesh but instead used to derive a n approximate mesh adjoint that can provide surface sensitivities.

Geometric Sensitivity
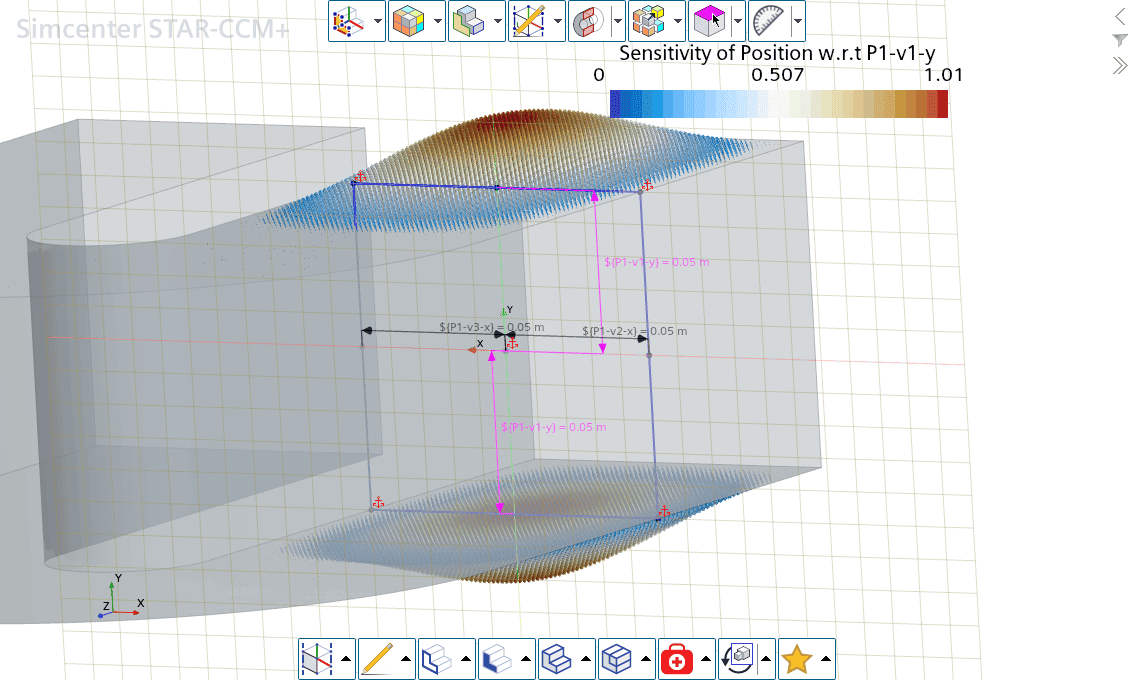
Geometric sensitivity allows you to efficiently assess how sensitive the surface is to changes in the parameters for each face on the surface. The surface needs to be defined by global parameters (Tool > Parameters). Please feel free to check out the dedicated blog article about Parametric Modelling with Simcenter STAR-CCM+ https://volupe.com/blog-volupe/parametric-modelling-with-simcenter-star-ccm/
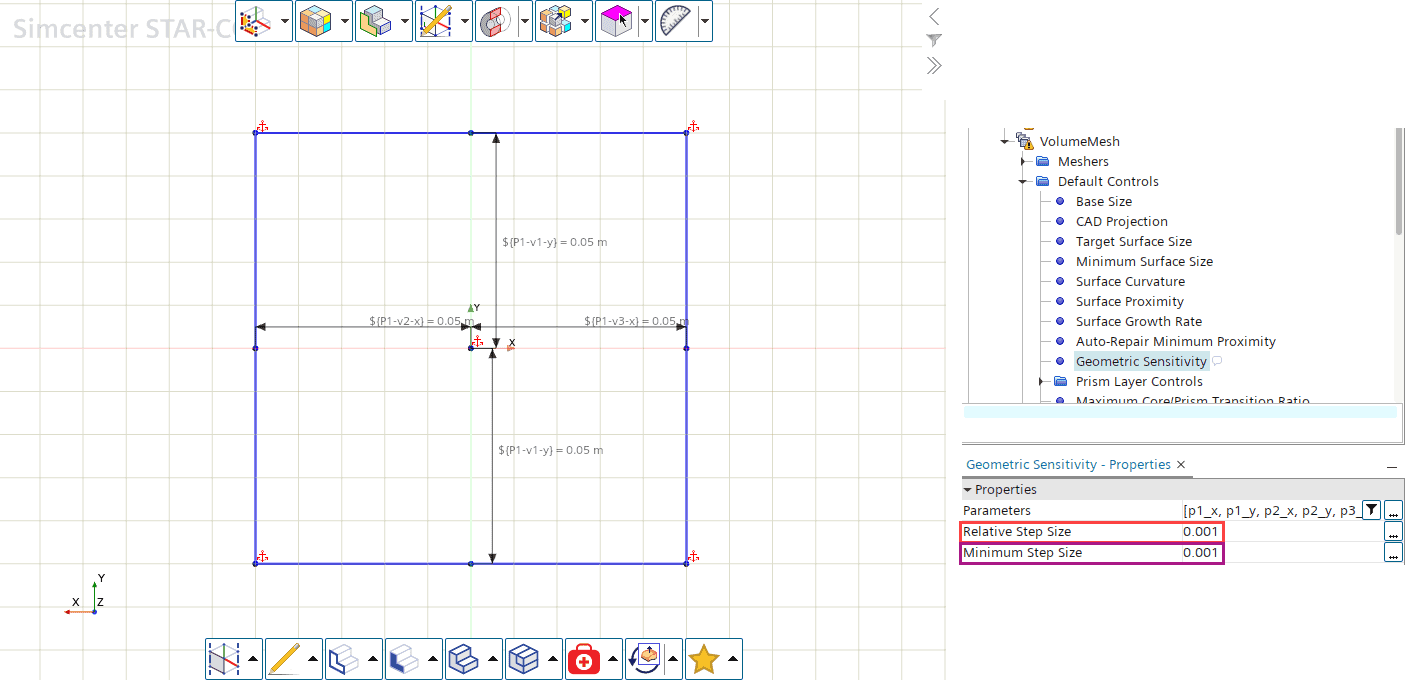
Once we have a parametric model, for instance by describing the underlying sketches as in the example from above, we can add the Geometric Sensitivity mesher and define the step size for the parameter adjustment. When executed, the mesher applies an offset, defined by the Relative or Minimum Step Size, to the geometric parameters. For example, if the minimum step size is larger than the relative step size, the minimum step size defines the offset.

On execution, the Geometric Sensitivity mesher applies the calculated positive and negative offsets to the specified parameters, then calculates the geometric sensitivity using a finite difference approximation.
Test case Adjoint Aftship JBC
If you wish to implement the new SQP optimization method in a marine context, there are certain constraints to take into account:
- As previously mentioned, this method relies on geometric and surface sensitivity and necessitates the utilization of the Adjoint solver.
- The use of the Adjoint solver limits its applicability in many marine scenarios involving motion and transient multiphase flow.
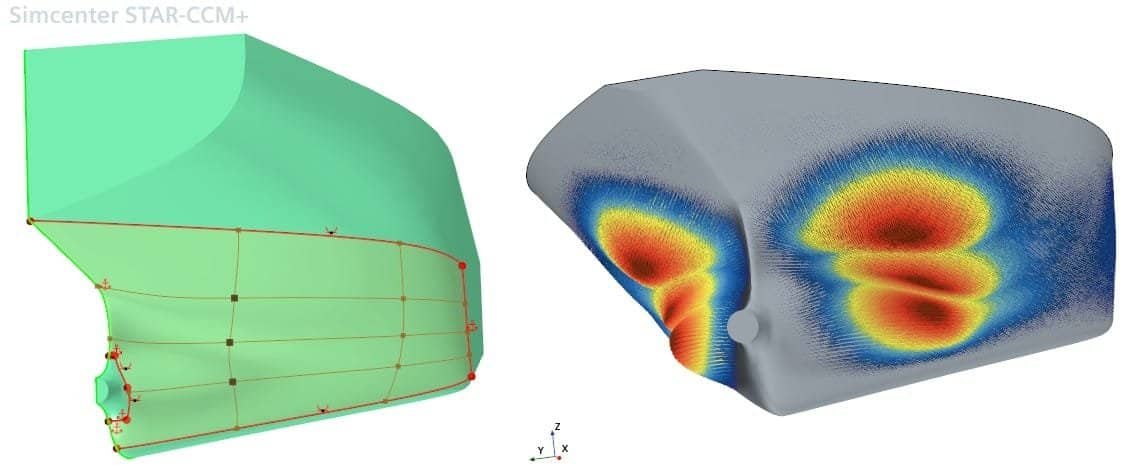
Consequently, the feasible option remaining is to conduct a dual-model test case involving the JBC (Japan Bulk Carrier). This test aims to enhance the rear section of the hull to achieve a greater wake fraction at the propeller plane. To achieve this modification of the existing hull design, we employ freeform modeling within a 3D-CAD environment, utilizing a total of 6 parameters to adjust the positions of 3 control points symmetrically.
One restriction to be aware of regarding the adjoint cost function is that the wake fraction average is evaluated at the propeller disk. This can typically be achieved by evaluating the Surface Average report on an arbitrary section. However, an Adjoint cost function cannot be evaluated on a derived part. Instead, we need to add an interface to the domain.
This setup is actually suitable for pure Adjoint Shape Optimization applying the Mesh Morphing, without involving an optimization algorithm. As reference we can compare the resulting hull shape with optimized hulls from the SQP and SHERPA algorithms.
Freeform modelling allows for controlled deformation, while morphing based on Adjoint sensitivity results in wider adjustments. This can be beneficial in finding solutions you have never thought of. On the other hand, can this yield solutions restricted by manufacturing.
In our little experiment, we can find these kinds of solutions. The Adjoint Shape Optimization introduces smaller changes to various locations while the freefrom approach results in more rigorous changes, reasoning to reduce the blockage in front of the propeller.
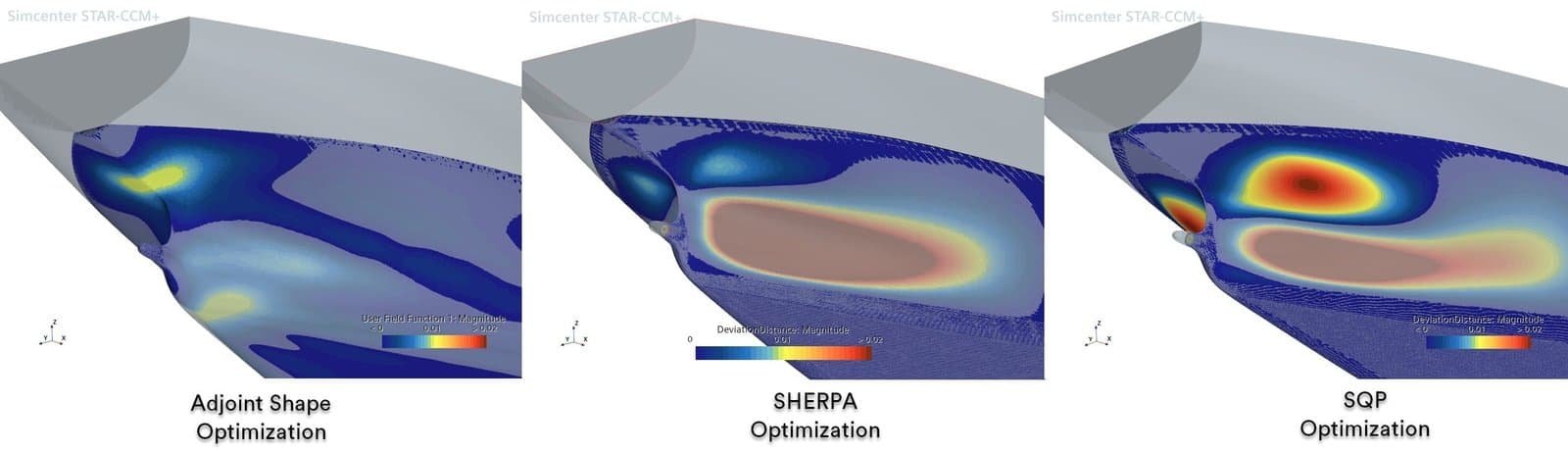
Consequently, the final flow field at the propeller plane of the free form optimization deviates significantly from the result of the Adjoint Shape optimization.

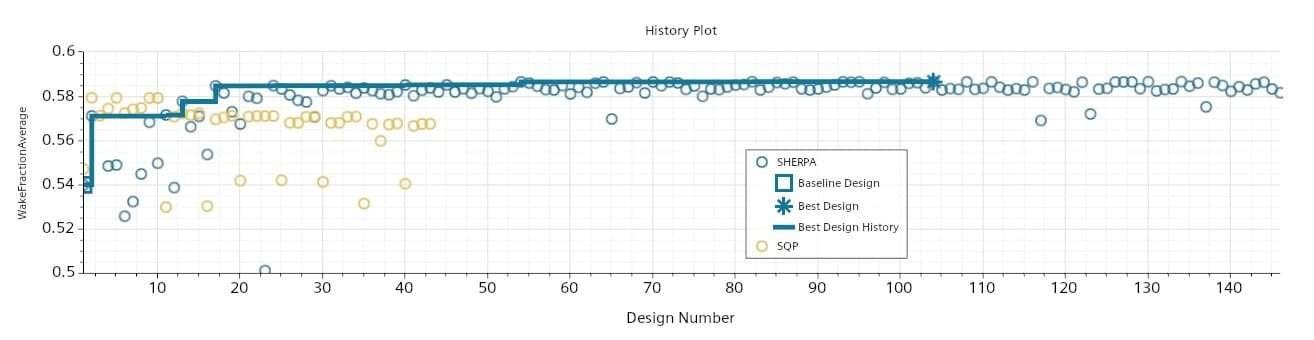
The development of the optimizations (SHERPA and SQP) shows that we were not able to reproduce the significant advantages of the SQP algorithm shown on the U-bend test case. The SHERPA algorithm find its best solution after 104 evaluations with a wake fraction average of 0.586. This is higher than both sensitivity-based optimizations.
The SQP optimization process converged to its optimal solution after undergoing six evaluations. Variant 6 was then employed to recalculate the sensitivities, which were crucial for determining the subsequent combinations of parameters. The parallel plot below visualizes the various parameter values and their corresponding averages of wake fractions. This plot reveals that the SQP algorithm had become fixated on an unfavorable choice of parameters, namely p1 and p2.

Notably, the selection of a negative value for p1_y had led to an increase in resistance and the increase of constraint violations. This trend clearly did not contribute to the improvement of the optimization objective, prompting the optimization process to be halted after a total of 40 evaluations.
In conclusion, when considering the implementation of the new SQP optimization method in a marine context, it’s essential to be aware of the constraints associated with its dependance on geometric and surface sensitivity, as well as the use of the Adjoint solver. While the freeform approach introduces more significant changes, it may be restricted by constraint considerations, e.g. minimum displacement. The SQP optimization method holds significant potential for expedited parameter-objective relationships compared to evolutionary algorithms. However, it requires a thorough definition of the parametric geometry.
For those interested in diving deeper into this methodology, we encourage you to stay tuned for further updates. As always, if you have any questions or comments, please feel free to reach out to us at support@volupe.com. We are here to assist you.
The Author
Florian Vesting, PhD
Contact: support@volupe.com
+46 768 51 23 46
