Multiphase flow has been lifted in the latest release of Simcenter STAR-CCM+ to a new level of hybrid modelling to improve computational efficiency. Seven different models for multiphase flow are available in STAR and can be combined to allow us to simulate for applications like Marine Hydrodynamics and Seakeeping, Fuel Cells, Spray Coating, Vehicle Water Management, Fluidized beds and many more. My colleague Robin reviewed and summarised the multiphase modelling capabilities in Simcenter STAR-CCM+.
In this week´s blog, I will focus on tank sloshing. It is typically recommended to model tank sloshing using VOF (Volume Of Fluid) multiphase model with AMR (Adaptive Mesh Refinement). A solution using AMR is, compared with a static mesh solution, up to 2.6x faster with better resolution of the free surface and it gives very similar results.
VOF
The VOF Multiphase model is suited to simulating flows of several immiscible fluids on numerical grids capable of resolving the interface between the phases of the mixture. Due to its numerical efficiency, the model is suited for simulations of flows where each phase constitutes a large structure, with a relatively small total contact area between phases (picture below, to the left). A good example of this type of flow is sloshing flow in a water tank, where the free surface always remains smooth. If the tank movement becomes pronounced, this results in breaking waves, large numbers of air bubbles in the water, and water droplets in the air (picture below, to the right). The method would then require a fine mesh (at least three cells across each droplet/bubble) to produce small modelling errors. Which makes it infeasible for sloshing with pronounced movement.

Multiphase Mixture with Large Scale Interface
Luckily there are more models available to cover each scenario you might be confronted with. In this case the Mixture Multiphase model (MMP) can be used together with the Large Scale Interface (LSI) model. The MMP model is the complete Multiphase Mixture implementation. This model can be used for an arbitrary combination of phases where the phase interactions can be of any kind.
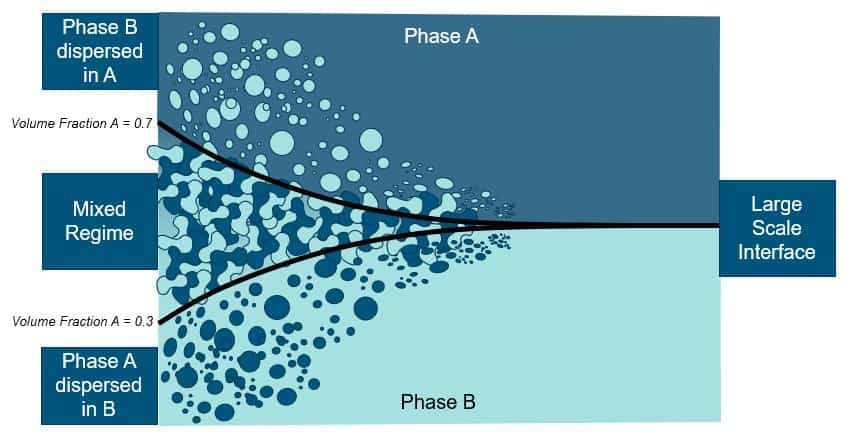
Hence, you can model resolved free surfaces and unresolved mixtures, and include both mixtures and free surface flows in the same simulation. To model the interface between phases, MMP utilizes the LSI detection model. This model determines the group of cells that contain a large interface.
MMP-LSI effectively combines VOF and MMP. These two models are from the same root in that they are single phase plus volume fraction, the difference is in the sub modeling. VOF captures free surfaces with the HRIC scheme, but does not include any modeling for mixtures (which may result numerically), whereas MMP models slip between phases to correctly model the mixture but does not allow for free surfaces. MMP-LSI does both supporting free surfaces and mixtures together.
Application
For a tank sloshing I tested the MMP-LSI on the tutorial for Tank Sloshing with Adaptive Meshing (Tutorials > Multiphase Flow > VOF: Tank Sloshing with Adaptive Meshing). This tutorial case uses both AMR and Adaptive Time-Stepping to improve the resolution of the interface with the minimum computation effort. This should always be the first choice to improve the quality of tank sloshing simulation. However, as described above, this approach might become a limiting factor in cases with a large mixed regime. It is therefore a biased test scenario since the motion and free surface are in favour for the VOF application.
For the general setup of MMP and LSI models, there is a good article with an example simulation available on Siemens support center: Simulating a Dam Breaking Problem using MMP-LSI Model in STAR-CCM+. When we use the MMP model, there are logically no VOF-waves available which requires the definition of the initial position and boundary conditions, manually. And reminds me on the how comfortable we can set up VOF simulations in STAR. One of the limitations for MMP is that AMR cannot be applied. But a work around is the Field Function based Refinement option to the automated mesh operation. You simply define a Field Function, similar to the one below, to define a 2 stepped mesh refinement depending on the volume fraction.
(${VolumeFractionAir}>=0.4 && ${VolumeFractionAir} <= 0.6 ) ? 0.001:
((${VolumeFractionAir} >= 0.1 && ${VolumeFractionAir} <= 0.9 ) ? 0.002 : 0.1)
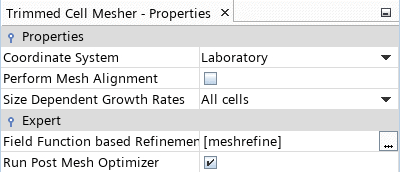
Then, set the Field Function based Refinement in Mesher Properties to that Field Function. The mesh goes out of date and can be re-meshed. However, since the free surface changed over time, we need to repeat the mesh updating quite often.

This is an easy task with Simulation Operation. We can create a loop to update the flow and re-mesh until Maximum Physical Time Stopping criteria is satisfied. During each loop, the simulation is solved only for a Fixed Physical time (here 0.01s) to propagate the flow just a little before mesh update.
VOF
MMP-LSI
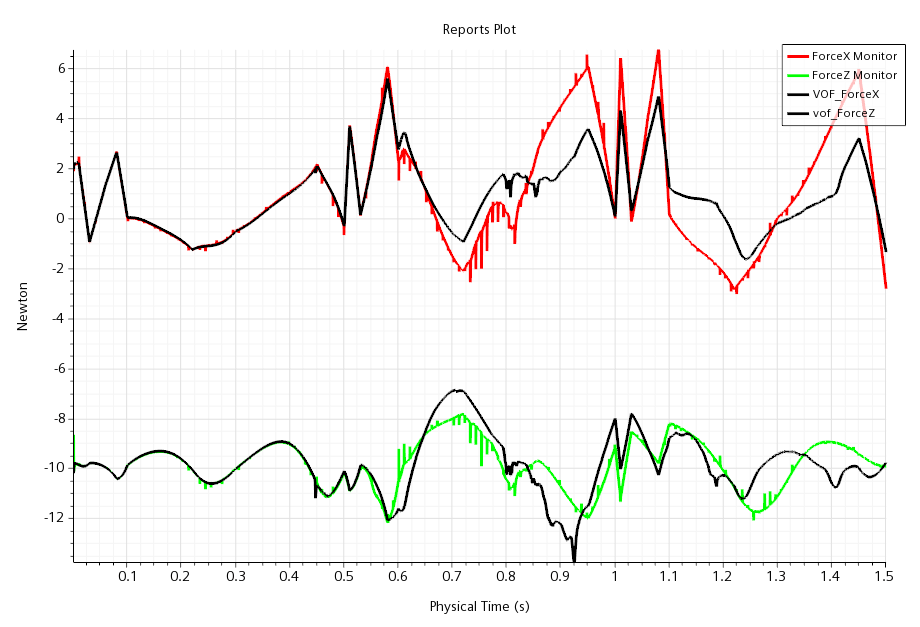
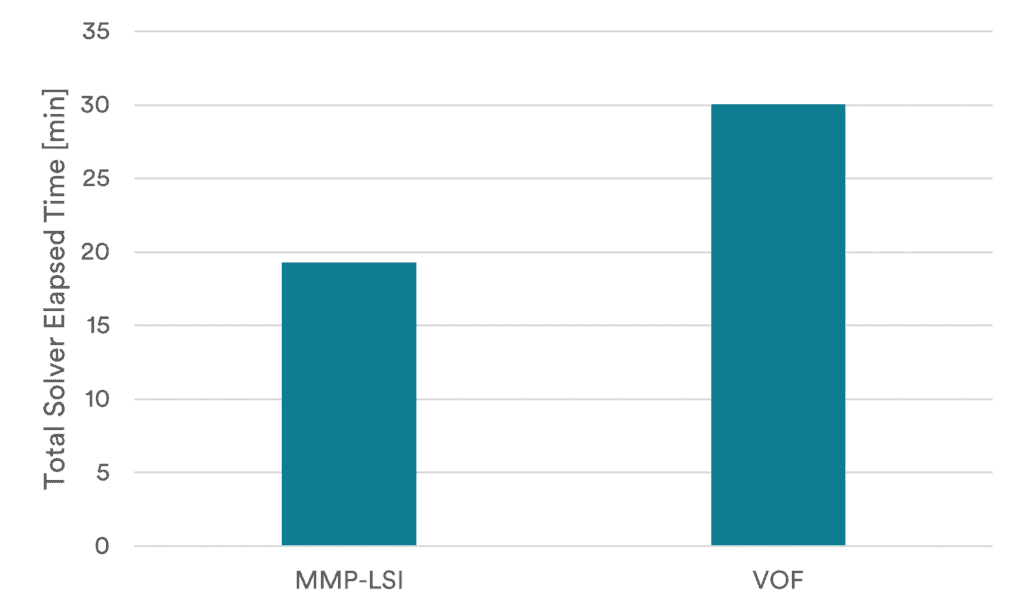
The main advantage lies in the time spend to solve the simulation which becomes more important when the sloshing results in more dispersed flow. The simulation with MMP-LSI was about 1.5 time faster while capturing the forces on the tank surface well. However, the interface is smeared using the MMP-LSI model.
The Author
Florian Vesting, PhD
Contact: support@volupe.com
+46 768 51 23 46
