When it comes to powering boats, ships, and other watercraft, the choice of propulsion system plays a critical role for the performance, efficiency, and maneuverability of a vessel. This decision often requires a careful balancing act, where different propulsors are assessed across a range of routes, varying operating conditions, and scenarios, while also factoring in fuel efficiency and ensuring satisfactory thrust performance. By relying on numerical simulations to predict the behavior of specific propeller or waterjet designs, and their interaction with the overall propulsion system under these conditions, a more thorough understanding of performance can be achieved.
In this post we outline the different types of marine propulsors available within Simcenter Amesim, but direct our attention to the methods and equations used within the traditional propeller models.
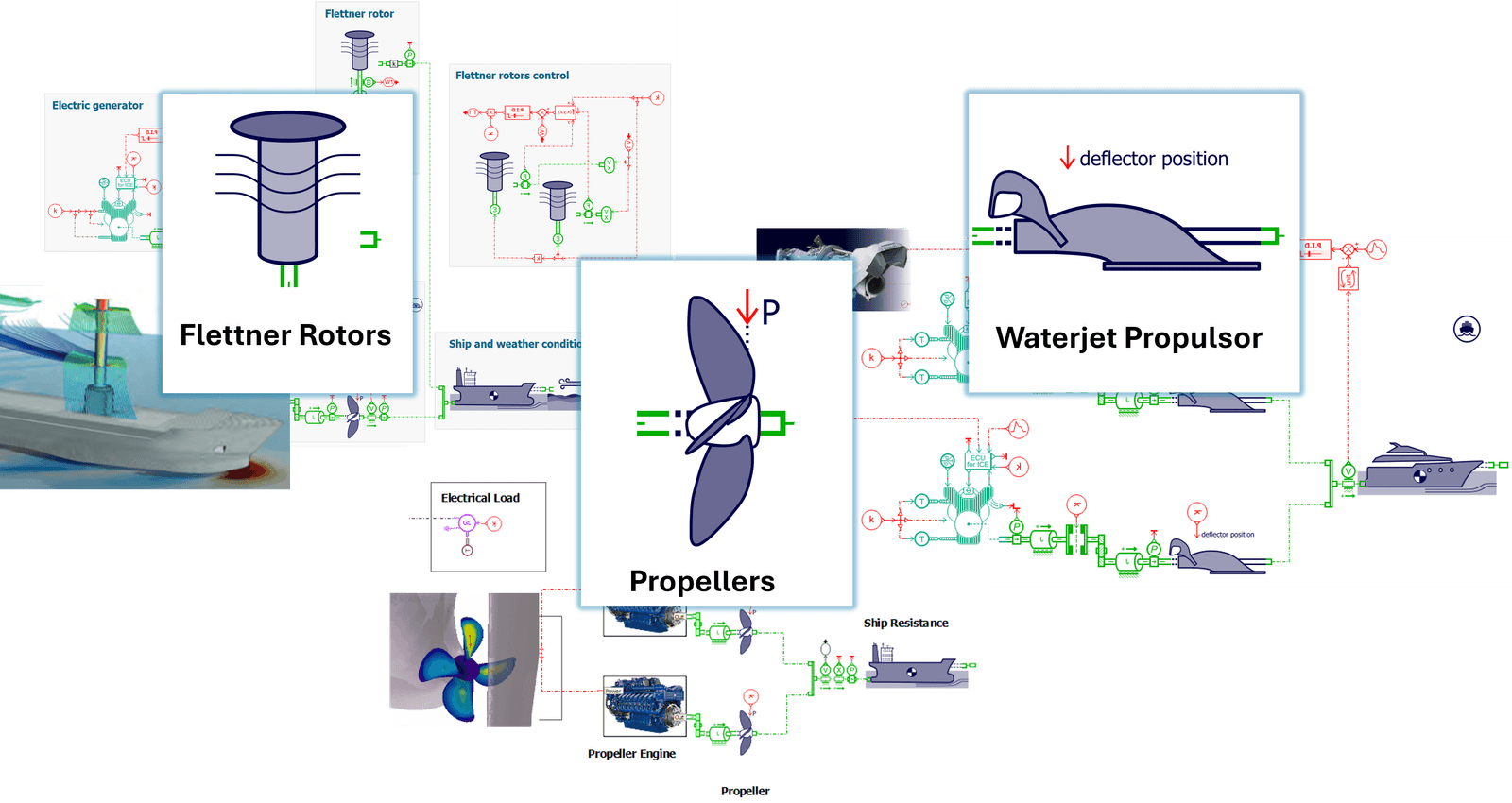 Flettner rotors, Propellers and Waterjets are types of commonly used marine propulsors which may be simulated when using Simcenter Amesim.
Flettner rotors, Propellers and Waterjets are types of commonly used marine propulsors which may be simulated when using Simcenter Amesim.
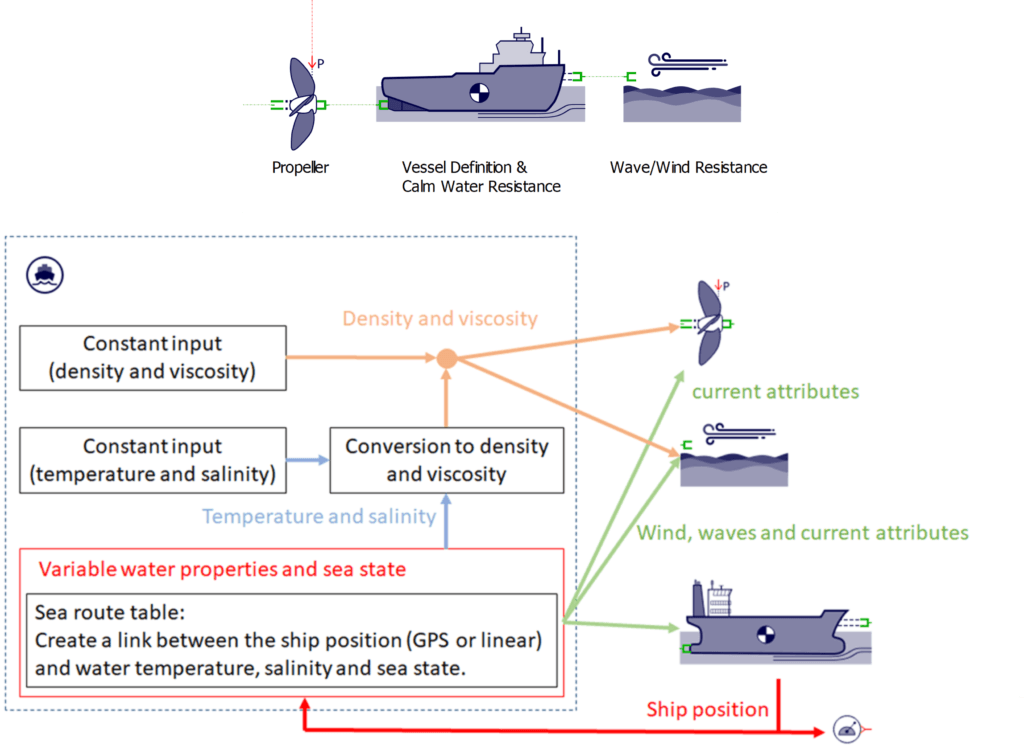
To begin with, we will first examine how the thrust-generating components are connected to ship models, which describes vessel characteristics, the hull’s open-water resistance, and potential underwater currents, as well as any additional resistance caused by waves and wind. These components balance the forces acting on the vessel to calculate the resulting one-dimensional surge motion at each timestep, taking into account the ship’s dynamics based on its displacement. As seen below, variations in density and viscosity along the travel route are considered, and the impact of changes in wave and wind direction relative to the vessel’s heading can also be modeled by detaining the position and direction of the vessel.
As this force balancing is done at every time-step, the instantaneous thrust required to accelerate or slow down a specific vessel can be assessed to establish propeller characteristics. This may for example be expressed as the thrust required to keep the vessel at different cruising speeds, or the thrust needed to reach a certain cruising speed at a given time. Furthermore, when such deliberations are combined with the more and more aspects of the vessel’s propulsion architecture and different mission profiles, some interesting insights into how things should work together are typically gained.
Having a closer look at the approach for modeling propellers in Simcenter Amesim, we find three propeller components. One of these is explicitly used for 3 DoF (Degrees of Freedom) manuvering simulation, however they all share many common features and equations.
Propellers in Simcenter Amesim uses five different approaches when characterizing the propeller to compute thrust, torque and efficiency.
- Wageningen B-series propeller model (first quadrant only).
- 2D tables for Kt and Kq as a function of the pitch diameter ratio (P/D) and advance coefficient (J) (first quadrant only).
- 2D tables for Ct and Cq as a function of the pitch diameter ratio (P/D) and advance angle (β) defined on 180° (first and fourth quadrants)
- 2D tables for Ct and Cq as a function of the pitch diameter ratio (P/D) and advance angle (β) defined on 360° (all four quadrants)
- Woodward method (all four quadrants)
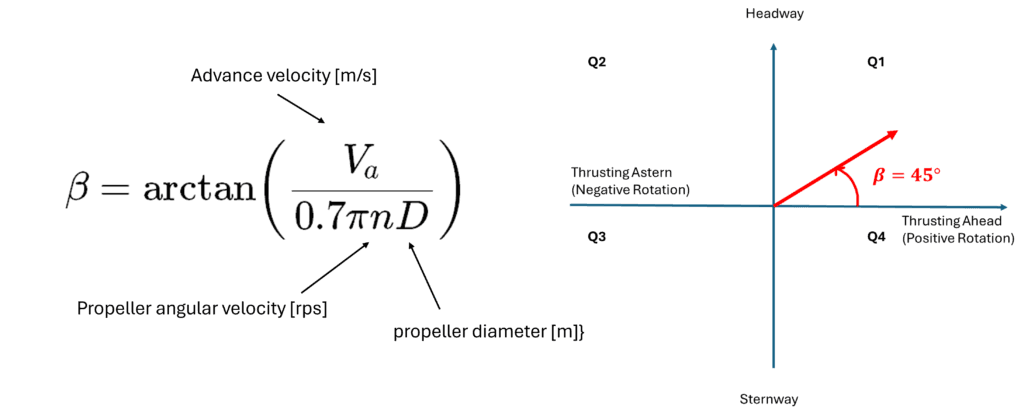
The reason for describing propeller performance using the terminology of quadrants is to account for situations where, for example, the vessel is not moving forward, or during astern propulsion. By defining the propeller data in all four quadrants, or modes of operations if you like, these situations can be accounted for. Below the concept of quadrants is outlined along with the definition of advance angle.
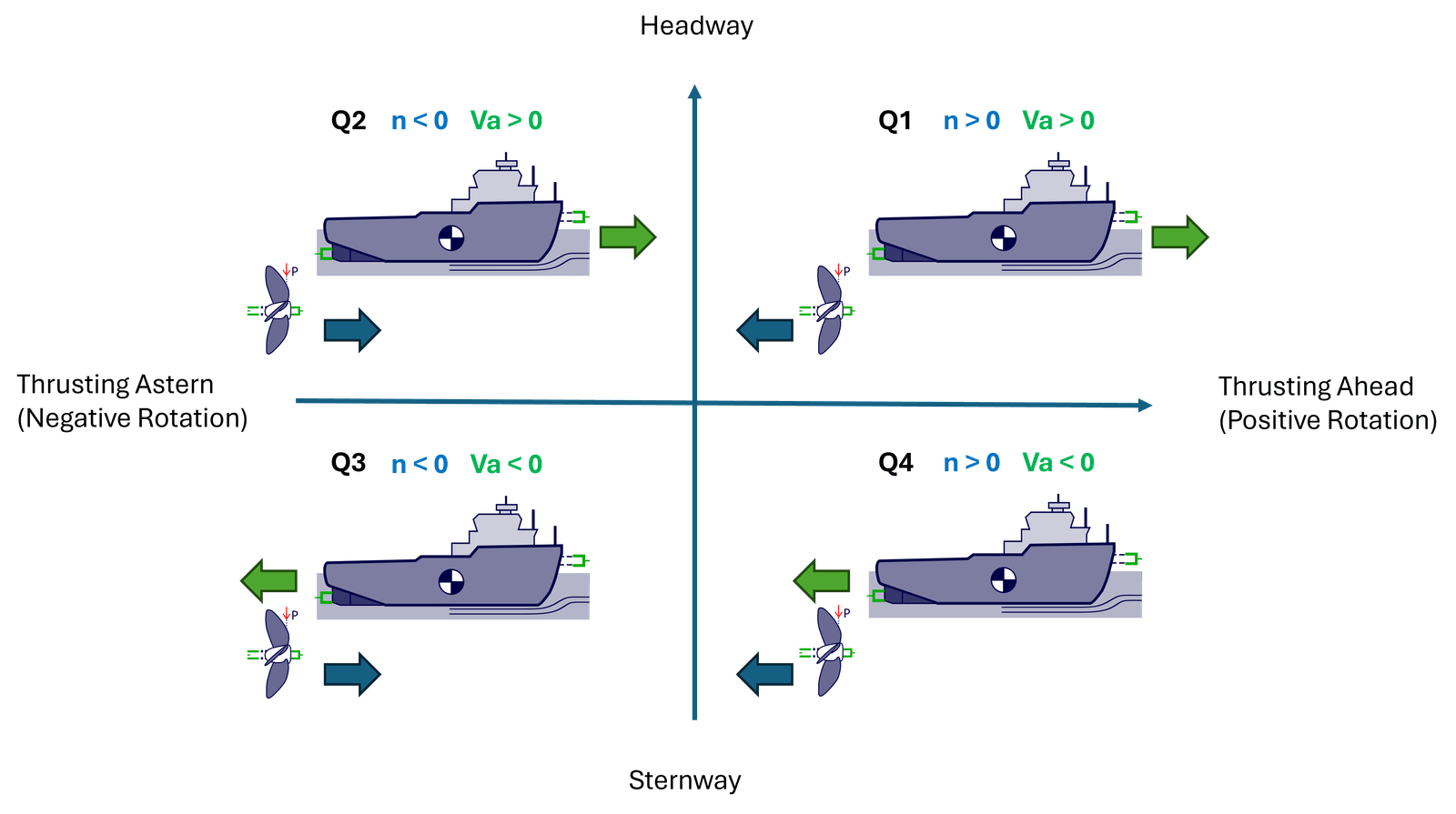
Quadrants definition:
1st quadrant: Advance speed – Headway, Thrusting Ahead – β varies within the range 0≤β≤90°
2nd quadrant: Advance speed – Headway, Thrusting Astern – β varies within the range 90°<β≤180°
3rd quadrant: Advance speed – Sternway, Thrusting Astern – β varies within the range 180<β≤270°
4th quadrant: Advance speed – Sternway, Thrusting Ahead – β varies within the range 270°<β≤360°
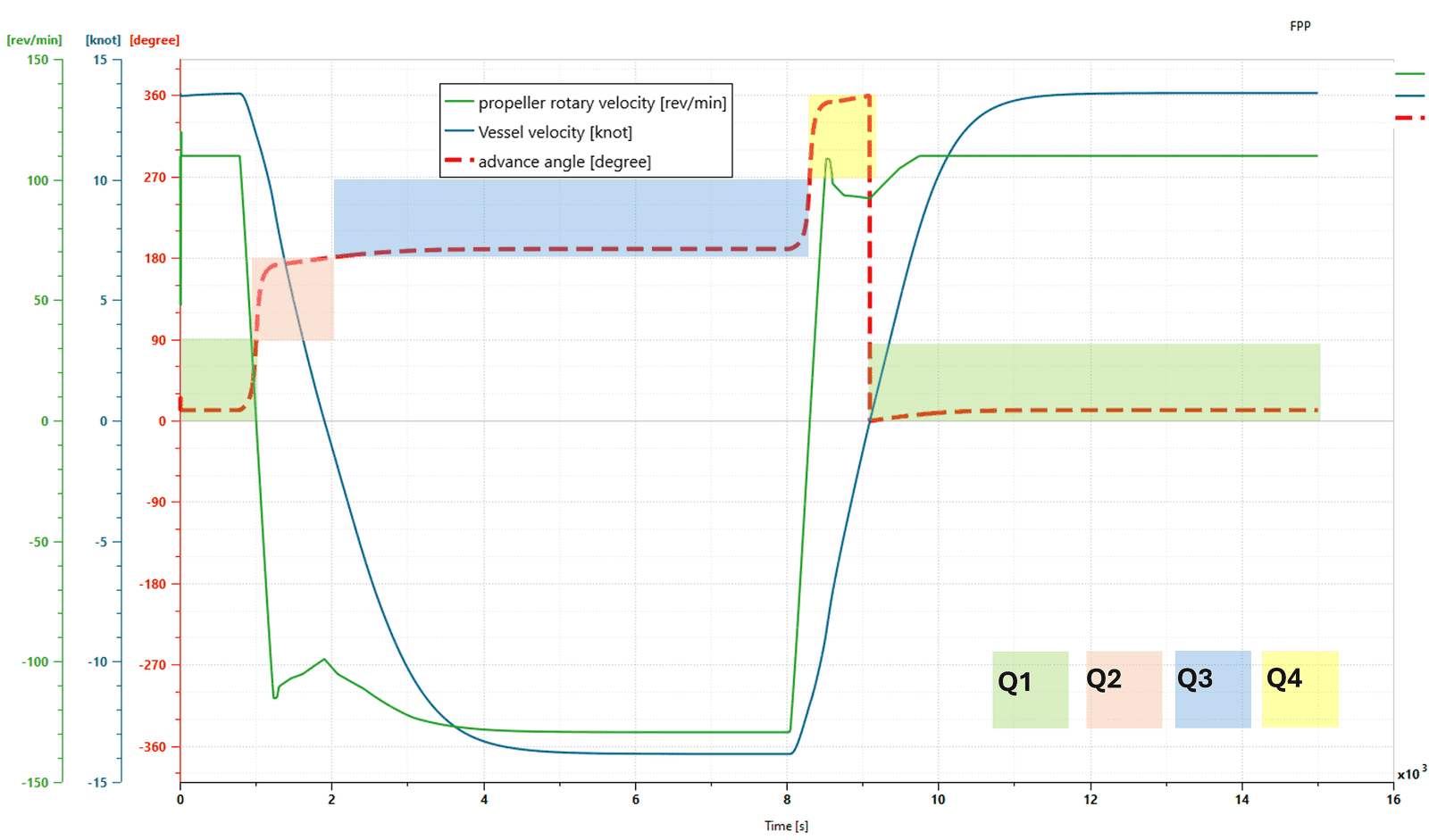
To provide an example of how ship motion and propeller thrust could operate in different quadrants, consider the following plot. In this, the vessel velocity is given in blue, propeller angular velocity in green and the computed advance angle in red. Periods when the propeller is operating in different quadrants is highlighted in different colors to illustrate how these change over time. At the onset, the vessel is at cruising speed (Q1). The vessel then starts to decelerate by reversing the propeller direction and thrusting astern, while still moving forward (Q2). Next, the vessel reverses direction and is moving astern and at the same time still thrusting astern (Q3). The propeller direction is then reversed again and starts to thrust ahead, during this time the vessel is still moving astern (Q4).
These different scenarios influence propeller behavior and should be accounted for if one wants to conduct such analysis.
Having a closer look at how thrust, torque, and efficiency are computed
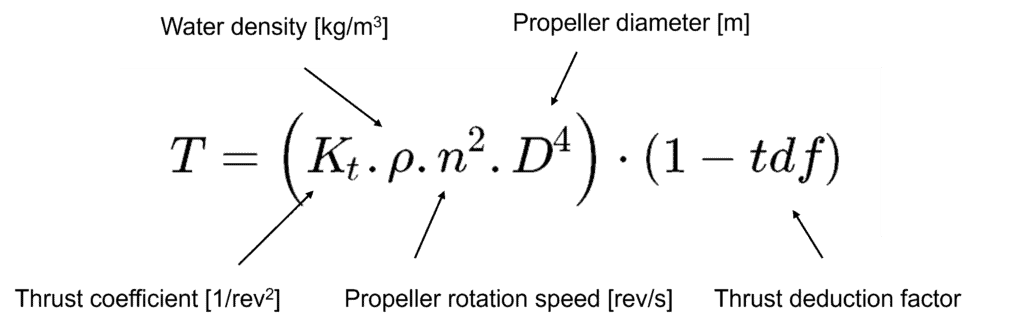
Propeller thrust [N] is calculated using the following expression.
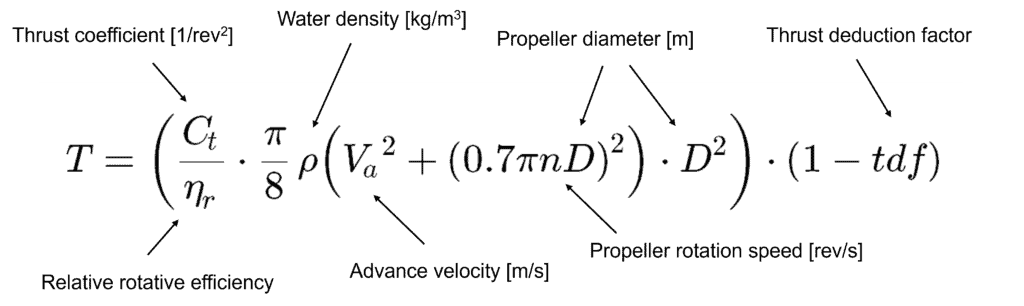
Similarly for the two and four quadrant models this equation becomes:
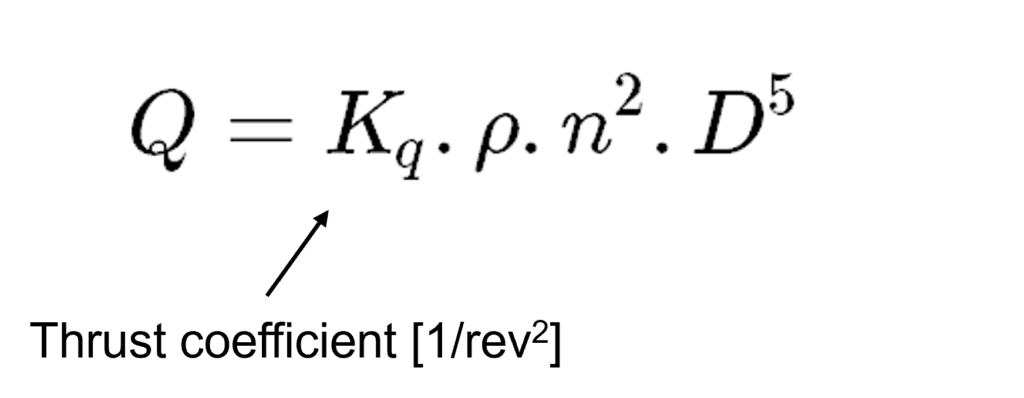
For the torque [Nm] calculations the following expression is applied to cases with a single quadrant propeller:
Whereas for propellers using more quadrants the expression becomes:
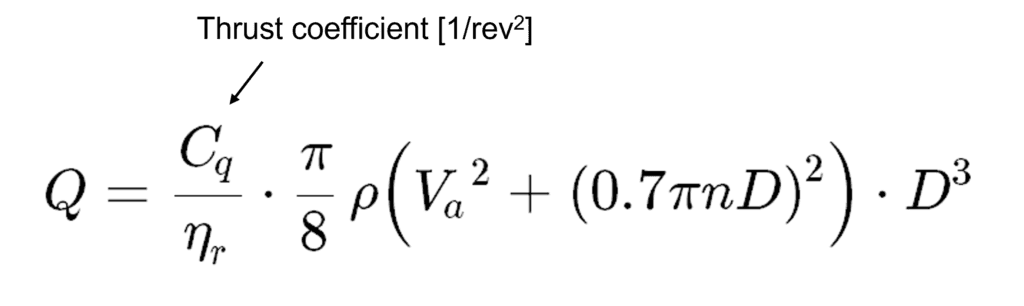
As seen from the equations above, both the Thrust coefficient (Kt or Ct) and Torque coefficient (Kq or Cq) characterizing the propeller need to be determined in advance using either 2D tabulated data derived from CFD or experiments, or by using the empirical approaches Wageningen B-series or the Woodward method.
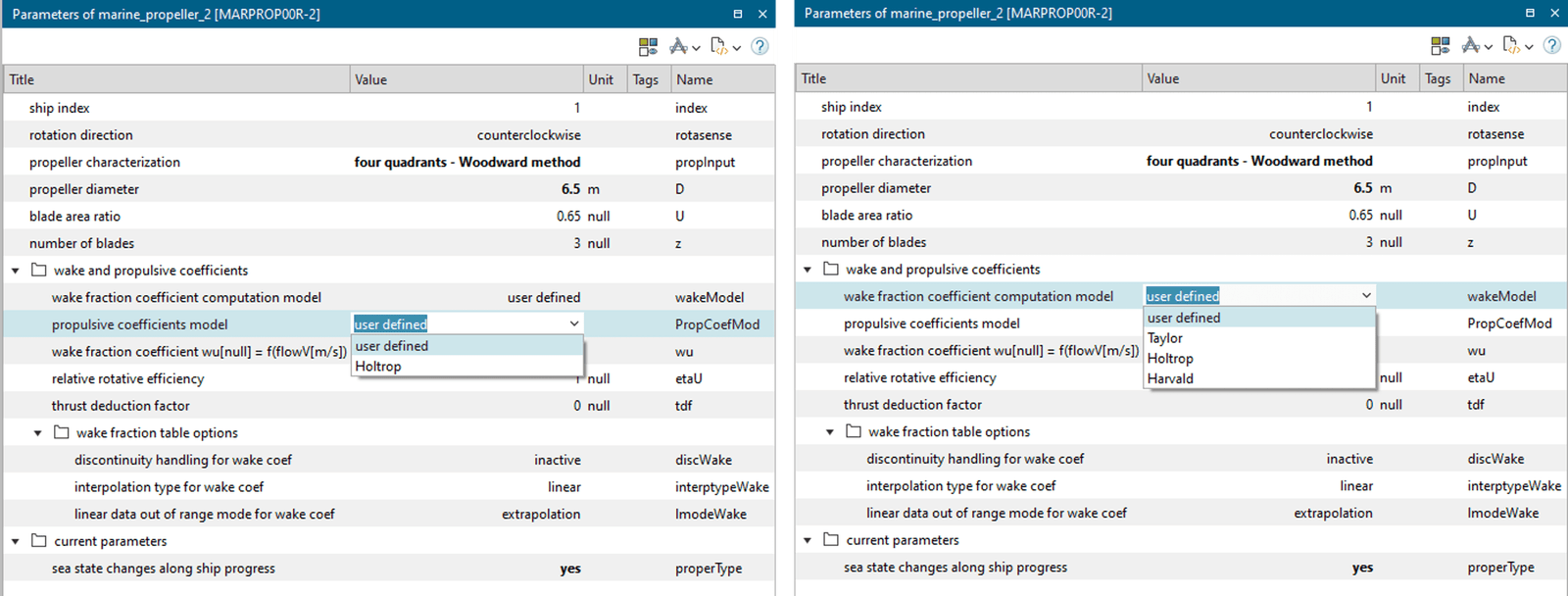
In addition to these coefficients, both the single and multi-quadrant approaches for calculating thrust takes in a correction term named Thrust Deduction Factor (tdf). For multi-quadrant approaches both thrust and torque take in the additional term Relative Rotative Efficiency . The idea behind these corrections, as well as for the corrections concerning ship wake, is to account for any hull-propeller interaction taking place and to adjust the openwater characteristics of propellers to that of the surroundings adjacent the hull. In Simcenter Amesim the Thrust Deduction Factor (tdf) may either be user-defined or computed using hull geometry following the Holtrop approach. The correction factor Wake Fraction Coefficient, used to correct the Speed of Advance (Va) found in the equations above, may be determined using one of the three available models: Taylor, Holtrop or Harvald.
Bringing our attention back to the Thrust and Torque coefficients Kt and Kq we will have a look at how these can be computed or established following the Wageningen B-Series model, or by means of 2D tables characterizing the propeller behavior.
The Wageningen B-Series model, based on the open water characteristics of some 120 B-Series propellers tested at the Netherlands Ship Model Basin in Wageningen, is a polynomial sum derived from regression analysis of these tests.
The model determines the thrust coefficient Kt and torque coefficient Kq through the sums expressed below using the tabulated data seen to the right.
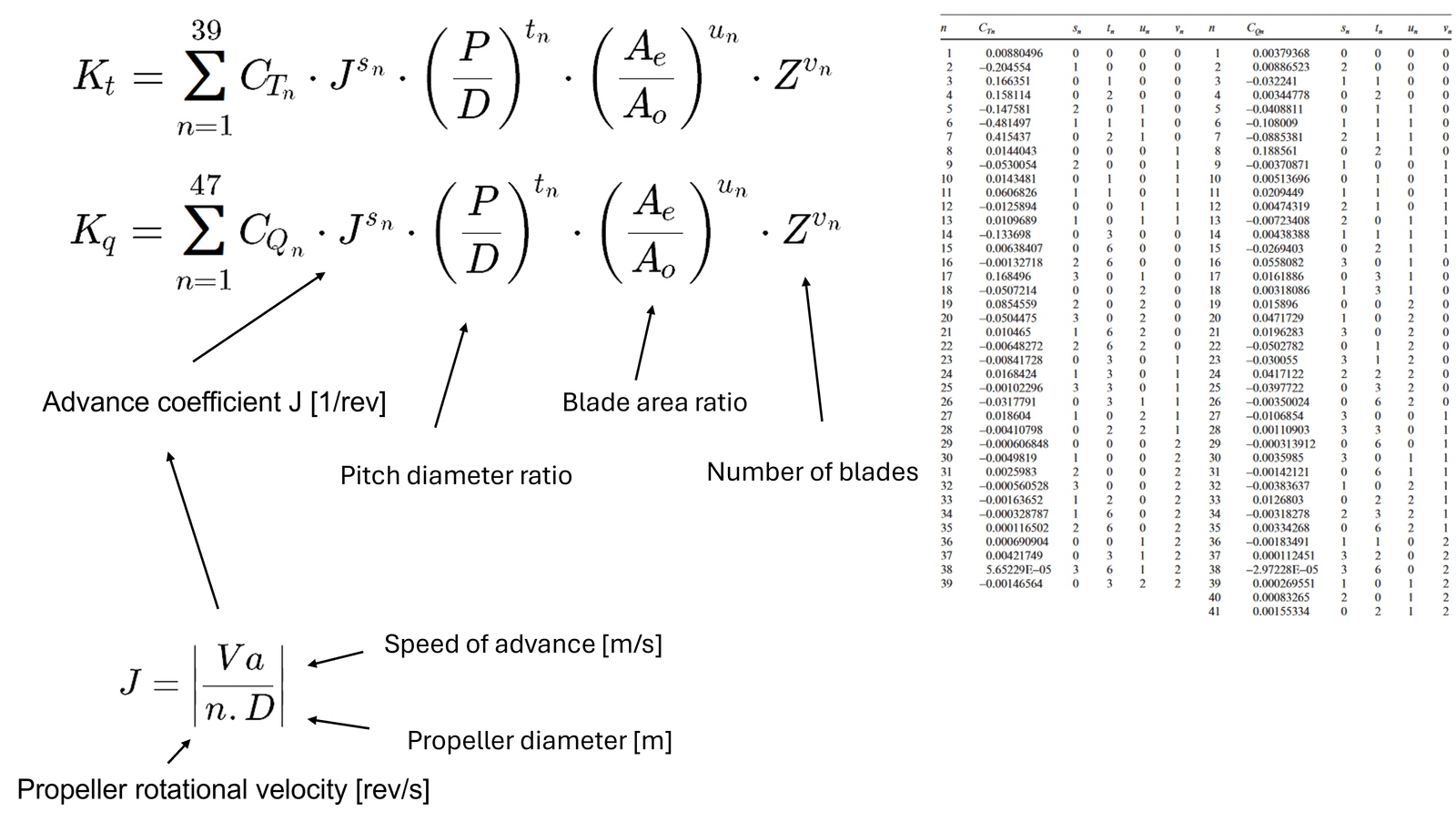
Similar to the Wageningen B-Series method in approach, the Woodward model also makes use of a polynomial sum to determine Kt and Kq. Although, where the Wageningen B-Series is applicable to the first quadrant propellers (thrusting ahead and forward direction), the Woodward model may be used in all four quadrants and is based on the advance angle .
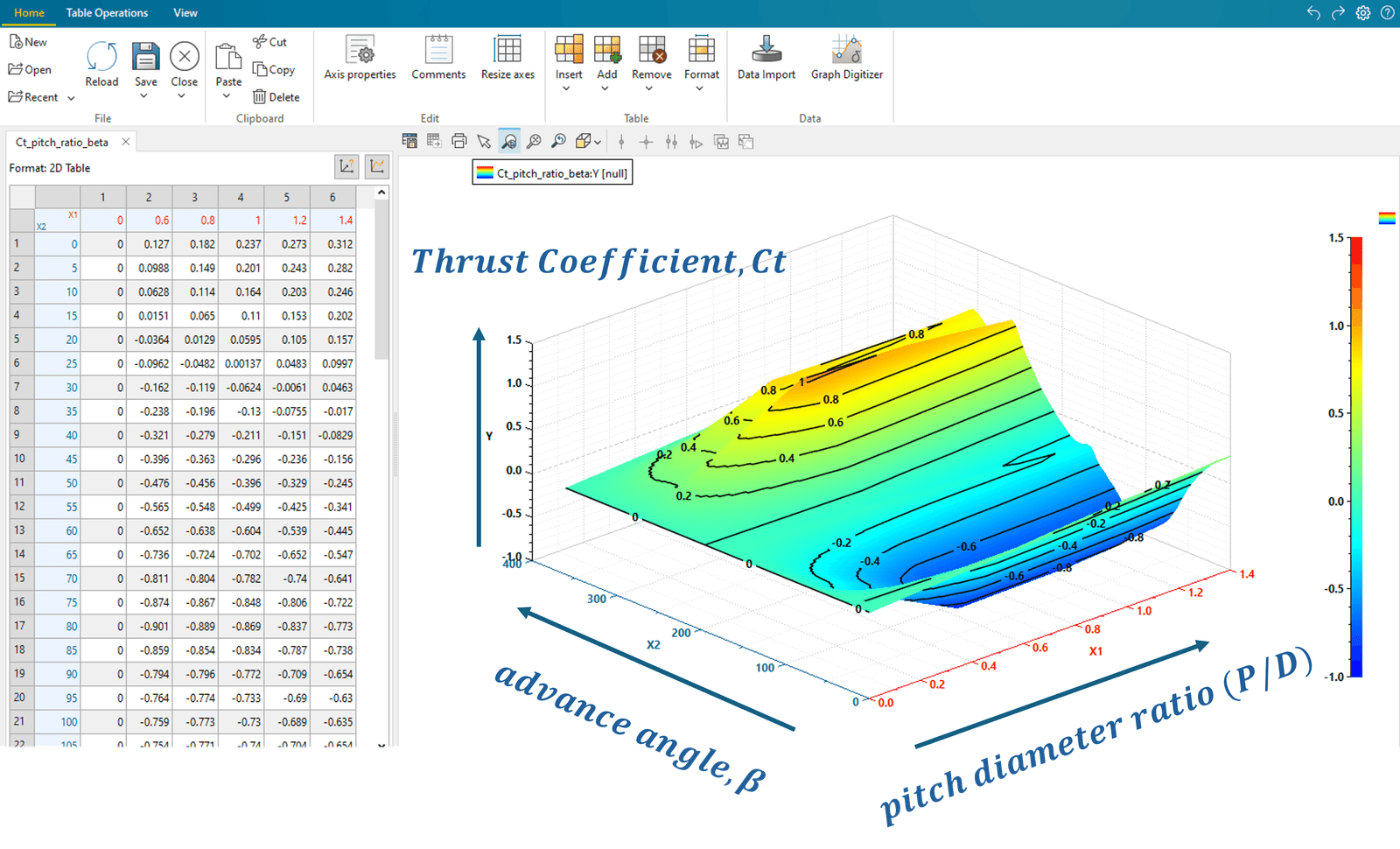
With 2D tables, users may define propeller characteristics specific to their design directly without relying on regressions of prior propellers. This is done by setting the propeller characterization method as such and specifying the thrust and torque coefficient tables.
Below an example of a 2D table is given valid for an advance angle between 0 and 360°. In this file the thrust coefficients is specified together with its dependency on advance angle as well as pitch diameter ratio.
We hope you have found this article interesting. If you have any questions or comments, please feel free to reach out to us at support@volupe.com
Author
Fabian Hasselby, M.sc.
