In this blog article we explore the possibilities of connecting a moving turret and boom with a vehicle traversing rough terrain. There are many situations where this is of interest to simulate. Non-road vehicles such as skylifts, excavators, forklifts, telehandlers, forwarders, forest harvesters, tractors, all share the ability to move from point A to B and the capacity to lift and carry something. Either while still in motion or once stationary. Understanding how the center of mass changes and how the resulting forces act on the vehicle when something is picked up and swung around becomes important when looking to understand what your vehicle limitations are, and perhaps more importantly, how to improve upon your design.
In Simcenter Amesim 2022.1 a new demo-model was introduced providing a step-by-step approach to model a complete telehandler with a rotating turret, rear wheel drive, and a chassis using complex kinematics. In addition to this “how-to” demo, a demo showing how this telehandler model can be used together with the Ground Designer tool to generate non-flat and rough terrain was added in 2022.1. For more information regarding the ground designer follow this link. In this blog post we will have a look at both these examples:
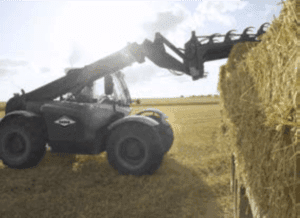
By combining the 3D Mechanical library with Vehicle Dynamics library in Simcenter Amesim, it is possible to study the interaction between a dynamic multibody system, such as a loader crane, and the vehicle motion from a supporting vehicle. The short video below demonstrates how such a functionality could be simulated. The turning motion of the turret is slightly exaggerated to illustrate the impact on the vehicle chassis.
To model the Telehandler shown in the video above we begin by acquainting us with some with some of the telehandler’s main features:
- A vertical joint used by the turret
- A horizontal joint for boom elevation
- A sliding junction for boom extension
- Oscillating steering axle
- Rear wheel drive using a simplified drivetrain, consisting of a torque signal and a classic differential
In the demo-model the mechanical turret and boom are modelled using recursive m6dof junctions, i.e. recursive joints with six degrees of freedom. In Simcenter Amesim, there are several possibilities to compute geometric constraints in junctions: Lagrange equations, mechanical spring and dampers, recursive joints. There are pros and cons for each approach as they both influence CPU time and govern if a model is realtime capable or not.
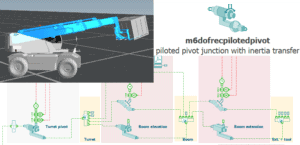
In the image above, the 3D mechanical model of the turret and extendable boom is modelled using recursive junctions. The recursive approach is a so-called tree approach in which there are parent joints and children joints. Each junction depends on its previous junction (parent joint), and each junction can have several children joints. Using this approach, part of the external forces and inertia is forwarded to the parent junction according to the child junction.
In the Telehandler demo-model there are four major parts that move, and each has its own description frame to manage its specific motion:
- Rc chassis frame
- Rt turret frame
- Rb boom frame
- Re extensible boom frame
Adding more moving parts/frames is of course optional. The oscillating axle and steering system could have for example been modeled using components from the 3D Mechanical library, which is stated in the demo description. It is however more convenient and computationally efficient to use the 15DoF chassis model from the Vehicle Dynamics library instead.
When defining the frames, i.e. defining how the different parts move in relation to each other, it is essential to start with a good understanding about their positioning and how they relate to one another. In the Telehandler demo-model the coordinate reference is set to relative, meaning no references are made to the absolute position. This allows for starting on non-flat surfaces, to use any initial speed, and is convenient when making alterations to a vehicle’s dimensions.
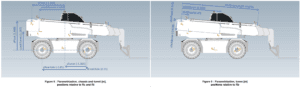
In the imagery above, the Telehandler’s chassis and turret frame positions (left) and boom frame positions (right) are given. Providing this information to the model is best done using the 3D Mechanical assistant which launces an interactive 3D viewer, although it is also possible to enter the position directly through the 3d ridged joint components on the sketch area. Wheel positioning is defined using the 15DoF Chassis from the Vehicle Dynamics library.
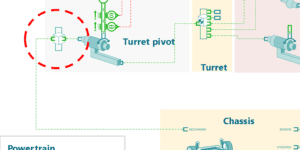
Please note that the turret position (Rt in the image above) in relation to the chassis reference frame (Rc) is specified using the M6DOFRTJOINT00 component, highlighted below. The orientation is specified in the turret pivot junction itself.
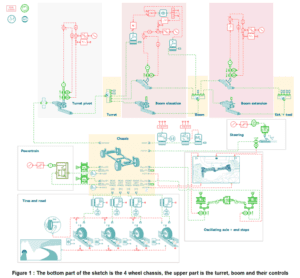
Below the entire system model is given. The mechanical turret and boom is connected directly to the 15DoF chassis through the mechanism port. Variable data such velocities, acceleration, angular positions, force, and mass and inertia matrix, etc. are conveyed via this connection and impact the behavior of the chassis, dampers, and tires.
Using this model in combination with the Ground Designer tool it is possible to account for rough terrain and obstacles to investigate aspects such as driver comfort, powertrain dimensioning, develop or check control strategies, operational safety, mobility in off-road environments, and much more.
We hope you have found this article interesting. If you have any questions or comments, please feel free to reach out to us on support@volupe.com
Author
Fabian Hasselby, M.sc.
+46733661021
