The Virtual Disk, a Body Force Propeller Method in Simcenter STAR-CCM+, has been a key tool in this domain, leveraging propeller performance curves obtained from Open Water tests. In this week´s blog article, we explore recent advancements in Virtual Disk, specifically focusing on the new iterative Induced Velocity Correction (IVC) and its impact on accuracy and robustness.
Until Simcenter STAR-CCM+ version 2310, the IVC was available as an expert option in the property of Inflow Velocity Plane and Sampled Velocity Plane, defaulted to OFF. When activated, it applied a one-step correction sensitive to the Inflow Plane Offset input. However, a paradigm shift has occurred with the introduction of an iterative approach, eliminating the need for the Inflow Plane Offset input and automatically placing the planes at the disk’s origin.
Key Features of the Iterative IVC:
- Improved Accuracy and Robustness: The new iterative IVC significantly enhances the accuracy and robustness of the Body Force Propeller Method. By iteratively correcting the induced velocity, the simulation captures more nuanced details, resulting in a more realistic representation of propeller performance.
- Automated Plane Location: In the past, engineers had to manually set the Inflow Plane Offset input. With the iterative IVC, the location of the inflow velocity plane is now automatically positioned at the center of the virtual disk. This not only simplifies the simulation setup but also contributes to a more accurate representation of the propeller’s effect.
- Reduced Dependency on Propeller Metrics: A significant improvement lies in the drastic reduction of the dependency of the inflow plane location on the interpolated propeller metrics when using virtual disks. This ensures that the simulation is less sensitive to variations in propeller data, leading to more consistent and reliable results.
Interchangeability of Operation Points: One of the notable advantages of the iterative IVC is the guarantee of interchangeability of operation point inputs. Regardless of whether rotation rate, thrust, or torque is used as an input, the simulation produces consistent and coherent results. This feature allows engineers to explore different scenarios seamlessly, providing a more versatile and user-friendly simulation experience.
Feature test
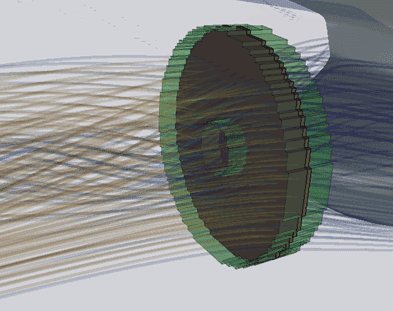
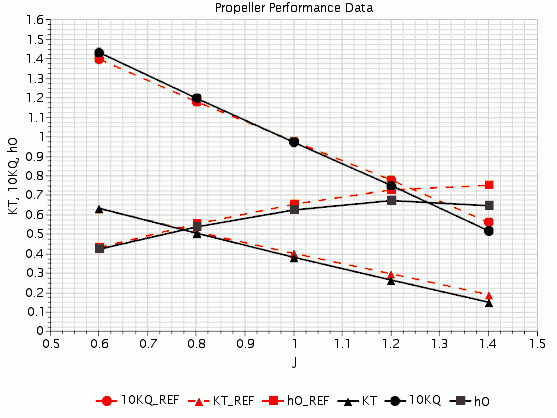
So let´s test the promising functionality of new feature on the PPTC in open water condition and in an artificial wake simulation. We use the open water curve as input to the VD, placed in the domain of the PPTC tutorial. This simulation setup is designed to run with the propeller geometrically represented in MRF simulation (link to tutorial). Results obtained match the experimental data quite good.
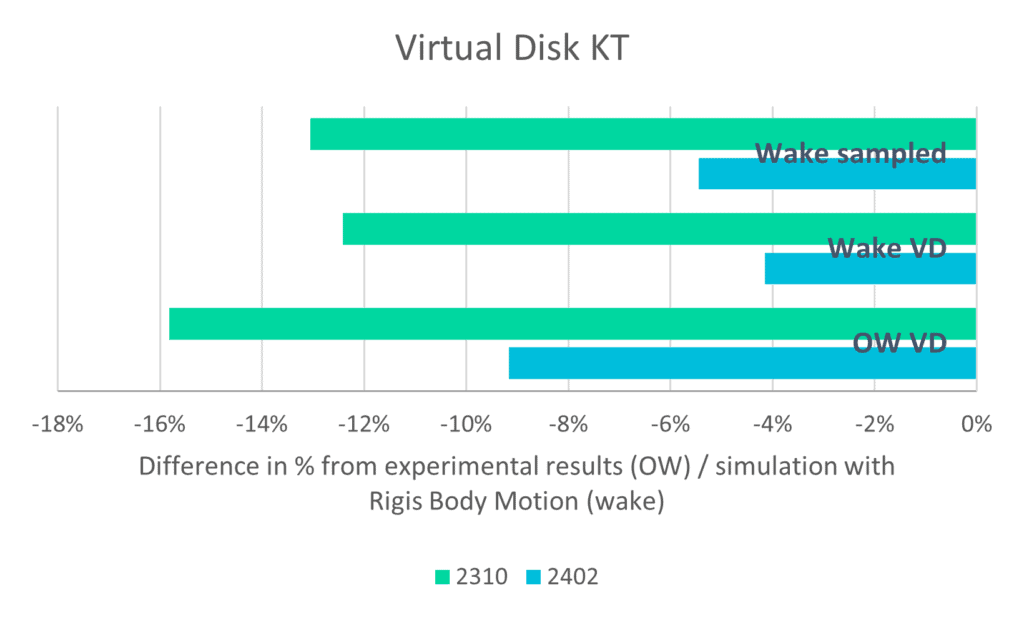
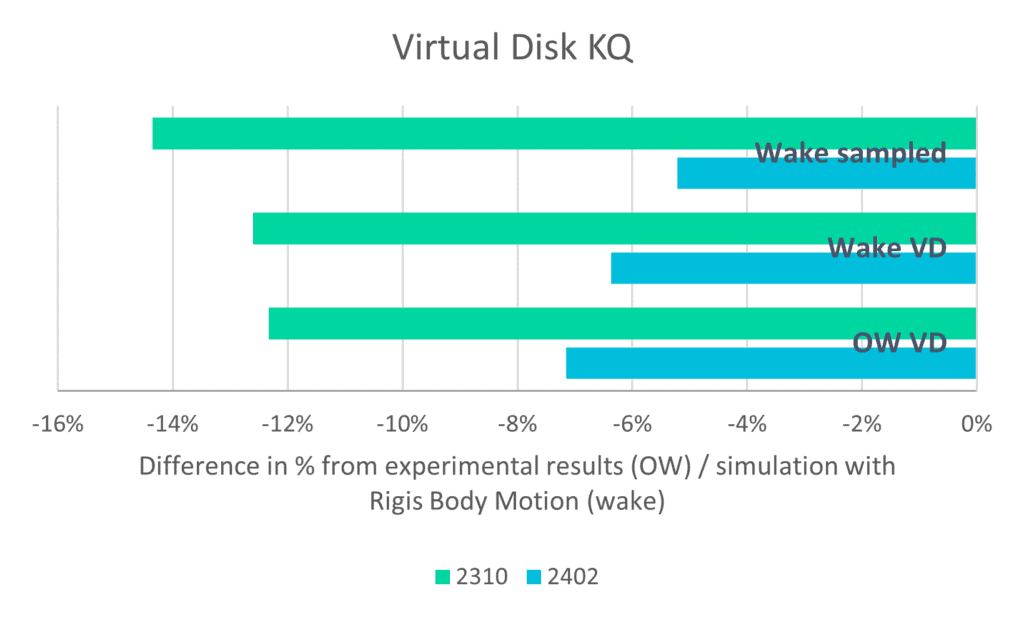
We can compare the results of the thrust and torque coefficients between the VD in Version 2310, without velocity correction, and the IVC in Version 2402. This comparison reveals a notable difference from experimental results, particularly evident in the open water case and the RBM simulation when using the uncorrected method in Version 2310. Across all simulations, there is a consistent underestimation of propeller forces. This discrepancy can be attributed to the overall process involved in calculating propeller forces.
In this example we give the operation point by the rotation rate n, which corresponds to the experimental approach.
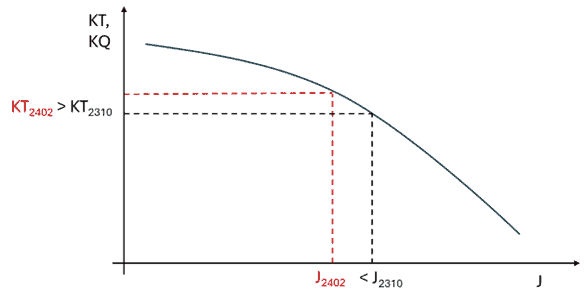
1. The advance ratio J is calculated.
J=\frac{V_{inflow Plane}}{nD}
2. The thrust and torque coefficients KT and KQ are interpolated from the open-water curve
K_T, K_Q = f(J)
3. With KT and KQ, the propeller produced thrust and torque are calculated
T=\frac{K_T rho V^2_{inflow Plane}D^2}{J^2}
Q=\frac{K_Q rho V^2_{inflow Plane}D^3}{J^2}
It is conceivable that the propeller’s impact on its own inflow would augment the velocity at the inflow plane, consequently leading to a higher J value as described in step 1. In the open-water simulation, the corrected inflow velocity was approximately 4.5% smaller compared to Version 2310. This adjustment resulted in higher KT and KQ values, while also reducing the deviation from experimental data.
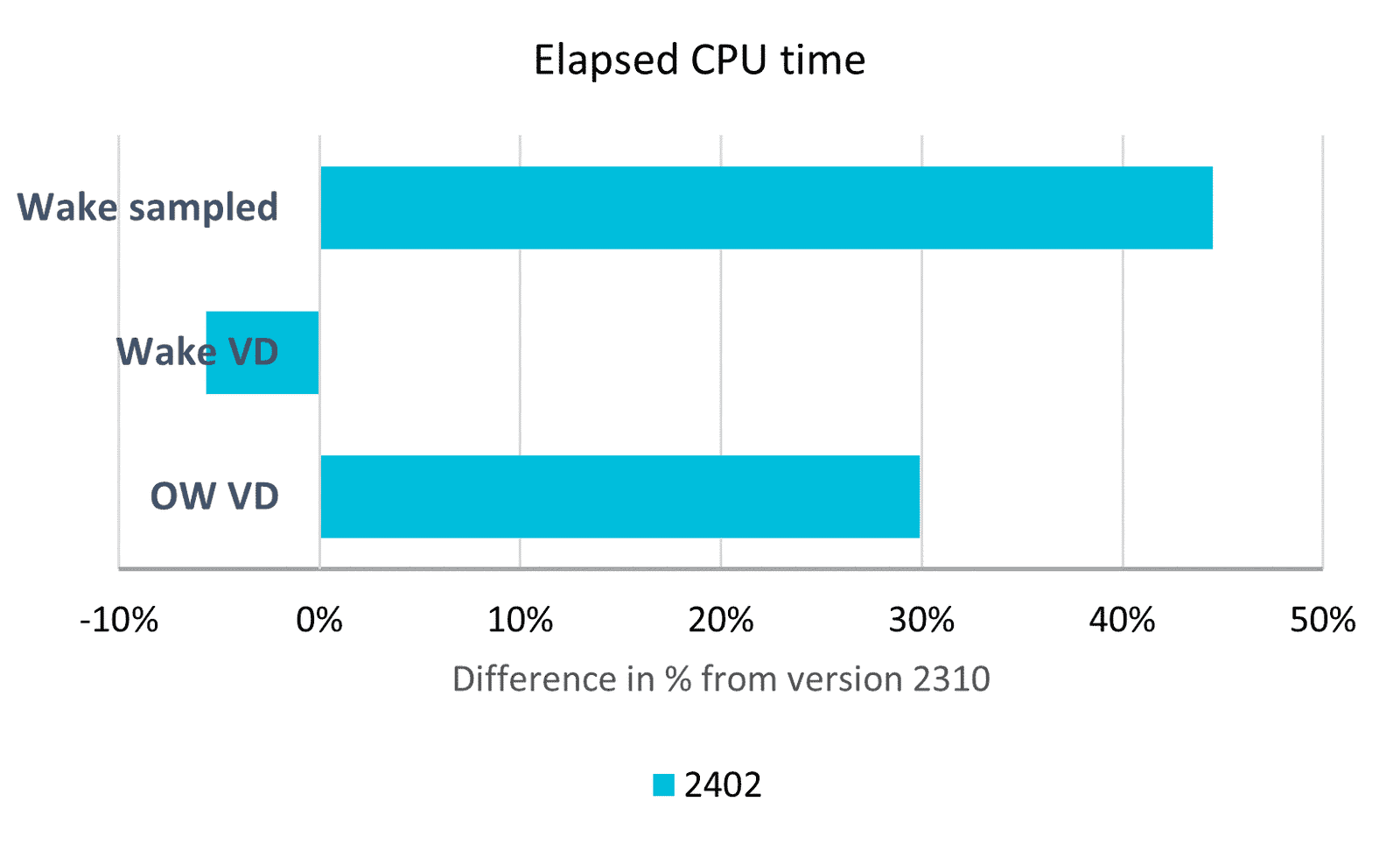
The correction of induced velocities does come with a computational cost due to the iterative nature of the process, imposing additional calculations. However, intriguingly, in the scenario involving blockages, the new method solves more than 15% faster compared to the VD in Version 2310. This efficiency gain is particularly noteworthy considering that this scenario represents the most significant application of the correction method.
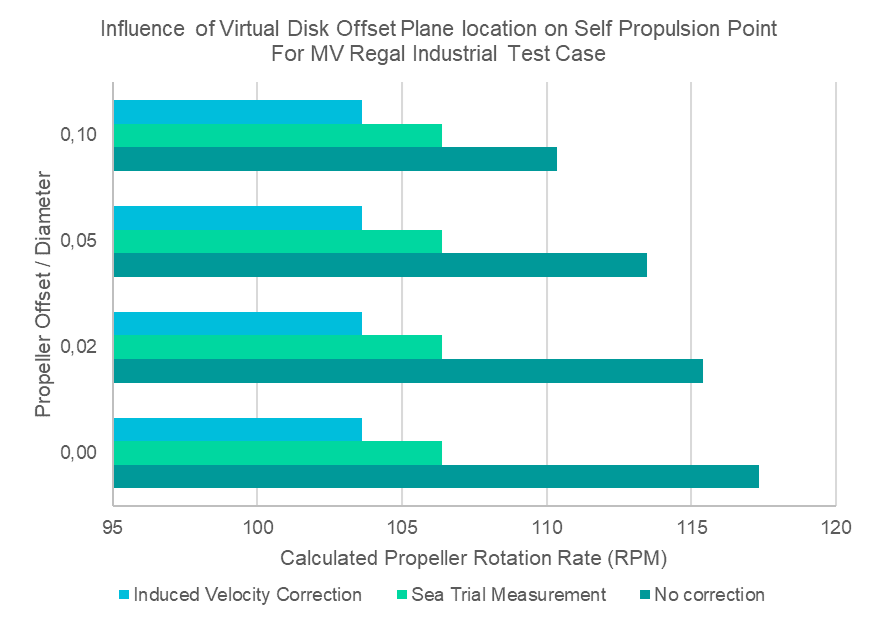
Comparing results with the new IVC to in-behind-conditions of the MV Regal Test case at selpf-propulsion simulation, reveals closer agreement with the sea trail measurements. Since the new methods corrects for propeller induces velocities more accurately, the results are independent of the propeller inflow plane offset.
Conclusion
The recent enhancements in the Virtual Disk Method, particularly the introduction of the iterative Induced Velocity Correction, mark a significant step forward in marine propulsion simulation. With improved accuracy, automated plane location, and reduced dependency on propeller metrics, you can now conduct simulations with greater confidence and efficiency. I am happy to see these innovations contribute to the development of more sophisticated and reliable marine propulsion systems.
If you would like to know more about this and other new feature in Simcenter STAR-CCM+, you can contact us via support@volupe.com.
The Author
Florian Vesting, PhD
Contact: support@volupe.com
+46 768 51 23 46
