Say “Hello!” to Simcenter STAR-CCM+ new velocity driver. In the latest release of Simcenter STAR-CCM+, version 2302, we get new features for the Dynamic Fluid Body Interaction (DFBI) model. These makes it much easier and less error prone to set up manoeuvring simulations. Let´s find out some details about the new methods and test them on an example in this week’s blog!
DFBI Follow Motion
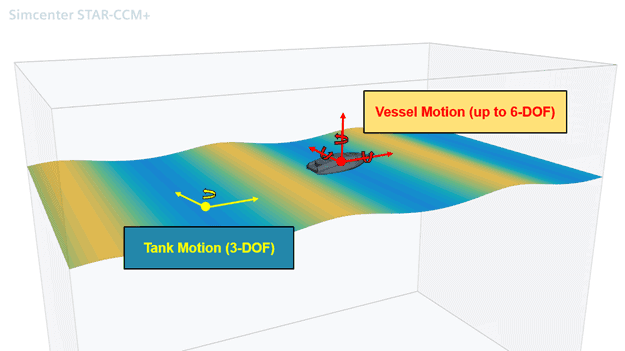
The first new feature is the Follow Motion. In applications with DFBI motions and overset, it is often helpful to translate the background region together with the translation of the overset region containing the DFBI body. An example is a ship simulation, where the ship moves and maneuvers in forward direction as part of an overset region, and one wants the background region to follow the ship in the direction in which the ship is moving, but not in the other directions. This is essentially the concept of the Forced Moving Wave Tank (FMWT Simcenter TV Broadcasts: Simcenter STAR-CCM+ Self-propulsion and maneuvering in regular Stokes waves) offering an effective way to simulate a wide range of marine applications in a unique simulation framework.
Up to now, the setup of such cases was possible by reporting the translation and rotation of the DFBI-Body and applying the reported values to a superposed motion for the background domain. However, as you can imagine, this is quite cumbersome and potentially error prone. To increase the ease of use for such applications, a new Follow Motion is introduced in Simcenter STAR-CCM+ 2302. Now, you can move a region together with a DFBI body.
- Right-click the DFBI-Body and create a new Follow Motion
- Select the directions in which the follow motion will move with the body
- Choose the Follow Motion just created in background regions Motions Specification
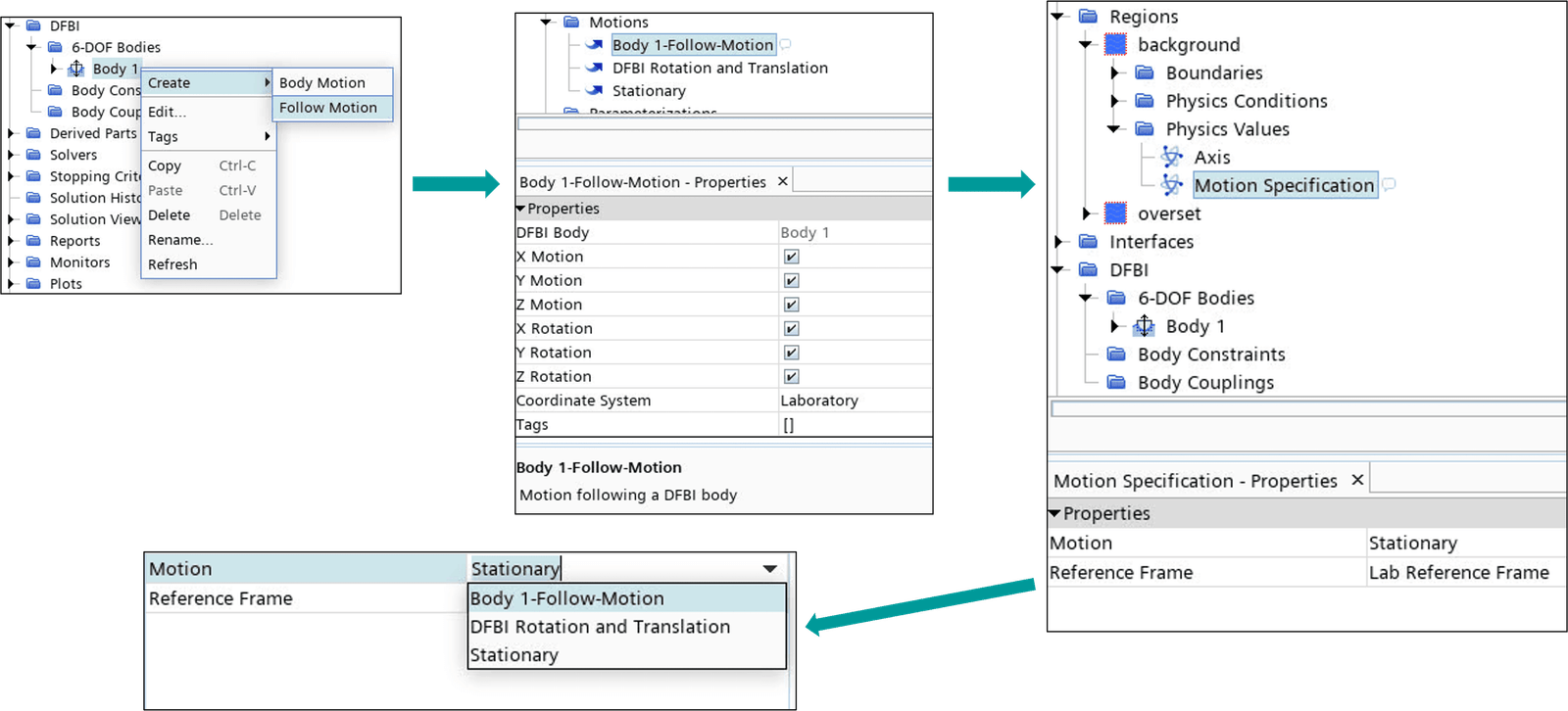
As simple as that!
DFBI velocity driver
The second new feature is the DFBI velocity driver! Which is actually a new type of DFBI constraint. It lets you simulate cases to define a velocity constraint in one direction while it is free to move in other directions.
The driver can be used to prescribe the velocity between the DFBI-Body and the environment, but also to prescribe the relative velocity between two DFBI-Bodies.
There are two important aspects to consider when setting up the velocity driver. To enable it, we need the DFBI body with body motion option set to Multi-Body Motion. And the driver is a kinematic constraint, which means it describes the motion without considering the forces that cause them.
Here is how to setup the velocity driver:
- Right-click DFBI > Body Constraints and select New > Contact Constraint or New > Velocity Driver.
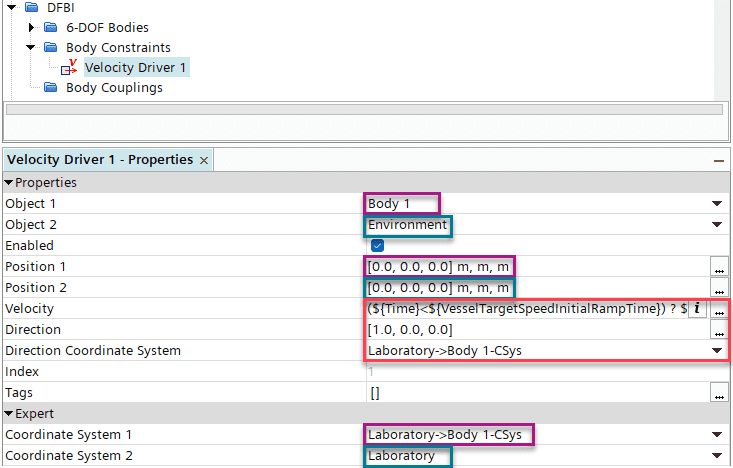
- In the drivers Properties: Set Object 1 as the Body 1 and Object 2 to Environment
- Set Coordinate System 1 to the body system Laboratory->Body 1-CSys and set Position 1 to the center of mass of the body, for example, [0,0,0].
- Make sure the Coordinate System 2 is the Laboratory coordinate system and set Position 2 to [0,0,0]
- Set the velocity:
In the following setup, the center of mass of Body 1 accelerates at a time dependent velocity in the x direction of the Body 1-CSys coordinate direction (forward direction of the boat)
The Velocity and Direction specified in the velocity driver must be consistent with the initial velocity and angular velocity of all the participating bodies. In this example, , according to the time dependent definition. To make sure the settings are consistent, you can use the InitialVelocityOfDfbiConstraint field function.
So, in a nutshell, this new functionality lets you keep the velocity constant in advancing direction and investigate insights into dynamic roll stability or minimum required power for seakeeping or maneuvers. We at Volupe hope that you find this explanation of the new feature useful for future projects to find better solutions. Please let us know your thoughts, comments and questions at support@volupe.com.
The Author
Florian Vesting, PhD
Contact: support@volupe.com
+46 768 51 23 46
