In this week’s blog post we will go over the possibilities of simulating particulate flows in Simcenter STAR-CCM+, within the Eulerian framework, specifically EMP. Going from very dispersed particles in a continuous phase to very densely packed particles, we will go over some models used and what physics need to be added to properly describe this type of flow. We have previously been talking about the capabilities of particle flow in the Lagrangian framework, with LMP and DEM [Multiphase modeling capabilities in Simcenter STAR-CCM+ – VOLUPE Software]. The Lagrangian framework of LMP is recommended to be used up to about a 10% volume fraction of the dispersed phase and it does not generally deal with interactions between particles. The DEM framework allows for as high volume fractions as the shape of your particles allow, but at the very high cost of explicitly modeling each particle, and its interactions with its surrounding as well. In Simcenter STAR-CCM+ you can also utilize the Eulerian framework for simulating particulate flows. This is done in the Eulerian multiphase model. The common denominator for particulate flows is the solid component of the flow. The continuous phase can be either a gas or a liquid. In the case of a gas, we refer to it as “Particle-Laden Flow”. Examples are pneumatic transport and fluidized beds. In Simcenter STAR-CCM+ we can use the “Granular pressure” model or the “Solid Pressure Force” model to consider high particle loadings. These models take the particle-particle interactions that are important for high particle loadings into account.
If we in Simcenter STAR-CCM+ decide we wish to or need to do a simulation for high particle loads in a gas phase, we can set this up in a relatively simple manner. At this point we do not bother with energy in the model, that comes later, but we wish to understand what we need to specify in order to do this properly. For instance, what do we need to specify more than the usual models? The picture below shows the model selection for the simplest case. Note here that the actual case or geometry is not of any interest as we are interested in model selection and different options. Let’s assume that we are interested in the application of fluidized beds.
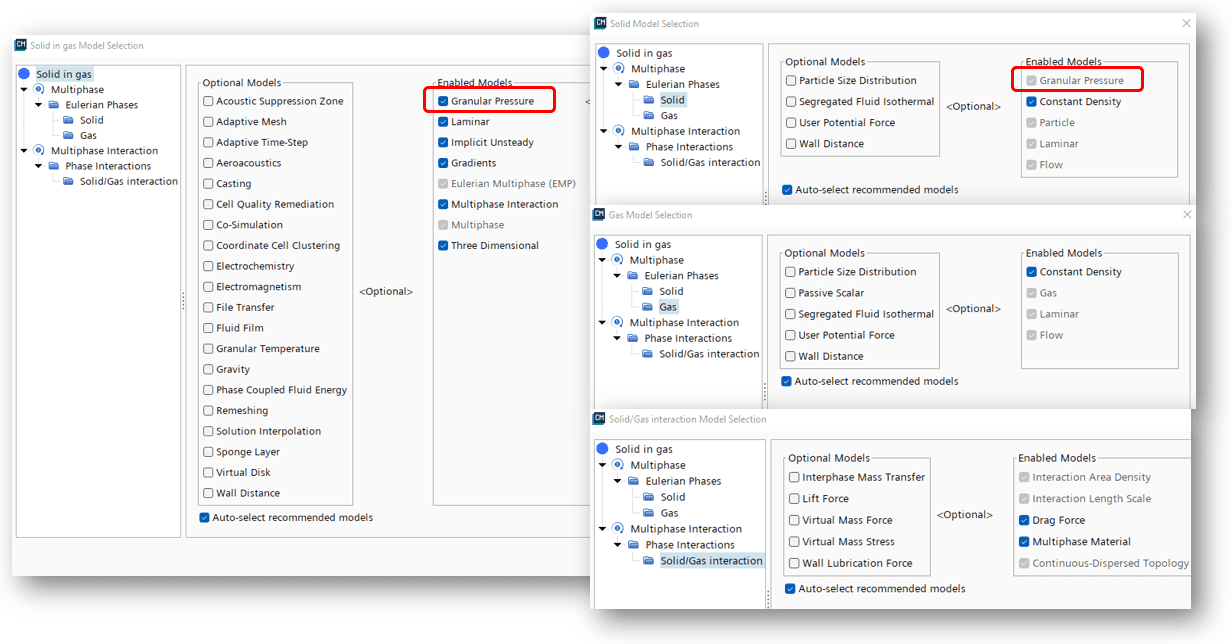
In the example I have selected granular pressure as opposed to solid pressure for the solid phase. The differences between those two models will be discussed later. But for now, we have a setup. Note that when selecting granular pressure and the “Auto-select recommended models” is active, the granular temperature is also selected. In the example here I have removed that from the phases and the base model selection. Furthermore, for simplicity the gas phase density is constant, this is to keep the number of active models to a minimum.
But before we look more at the details of these models, we need to understand the range of models provided to us by the range of fractions for the dispersed solid phase.
Fluid-Fluid Drag-Coefficients
Drag is one of those things we model in Simcenter STAR-CCM+ using a correlation of some sort. When talking about drag the most commonly used model is Schiller-Naumann drag coefficient for spherical particles. The implementation of the model in Simcenter STAR-CCM+ is shown below.
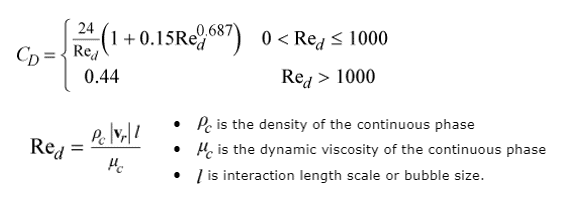
The Schiller-Naumann drag coefficient is valid for Newtonian fluids, but can be expressed with different additions to account for a non-Newtonian fluid in the continuous phase. This will not be handled in this blog post, but please see the documentation for those models. The drag coefficient is then linearized and multiplied with the relative velocity between the phases to describe the Drag Force acting on the particle. But this is standard procedure. The Schiller-Naumann drag model is developed for a single spherical particle in a continuous phase. If there are more particles, the correlation fails. That is why some drag correlation models in Simcenter STAR-CCM+ have a model for drag correction. Out of the predefined models, only Schiller-Naumann has the drag correction model selection. The drag correction models then modify the single-particle drag coefficient in a multi-particle system.
Richardson Zaki Drag Correction is one example of the available correction models in Simcenter STAR-CCM+ and the one that has the largest applicability. This will also not be handled in detail in this post on the particular flow, because it is better to use a drag model that is more relevant for the application. Again, see the documentation for the available drag correction models and their applicability.
Fraction of dispersed solid phase
Before we look at a model that is relevant for the drag, it is impornatnt to understand that the fraction of the dispersed phase is what decides how this should be modeled. Like the Schiller-Naumann model that represents the single spherical particle in a surrounding fluid. When the fraction is increased, in other word, when the single particle no longer is as alone/isolated, this need to be taken into account in the interaction between the phases. We can use a correction or a model that deals with this directly. We can for all intense and purposes at the lowest fraction use population balance modeling (PBM) [Population balance in Simcenter STAR-CCM+ – VOLUPE Software] even for a highly dispersed solid phase. We would use the PBM as a means to keep track of the particles, especially if their size is represented by a distribution. If the size is constant, there is little need for a PBM, since it will only provide unnecessary overhead. Note that the PBM for a solid phase is only to track the sizes, whether you are using S-gamma or AMUSIG, the concepts of coalescence or break-up are of no use. These models in the PBM:s deal with what happens for droplets and bubbles, gases and liquids, not solids. If you need to look at particle attrition or particle damage, this can be done in the DEM framework, but more on that another time.
Gidaspow drag model
So, we have a large fraction of particles, larger than what we feel the correction models for Schiller-Naumann can account for. For fluid-solid drag we talk about drag models, here the linearized drag (AD) is what the models refer to directly. Let’s use the Gidaspow drag model as an example.

The Gidaspow drag model is appropriate for solid dispersed-phase applications such as fluidized beds, where the particle loadings are high. The model introduces a transition volume fraction, that is used to switch between the expressions in the formula. For fraction above the transition volume fraction (set to 0.2 as a default value in Simcenter STAR-CCM+) the inter-particle forces affect the particle velocity. This means that not only are the particles disturbing the continuous flow, so that correction needs to be made for the drag, but also the particles impact each other via collisions. Even below the transition volume fraction (seeing as it is as high as 0.2) inter-particle forces affect the particle velocity, and that is what the correction factor for hindered settling is used for. The upper term in the Gidaspow model is a formulation of the Ergun equation, while the lower term represents a modified Stokes law.
So far, we now understand that the level of solid fraction determines how we need to calculate drag essentially. If particles can be considered “alone” we can use the standard Schiller-Naumann formulation. If the particles are more densely packed, for instance the Gidaspow drag model is more appropriate. The next step now is the granular flow approach, applicable for even higher fractions.
Granular flow
We speak here of high and low fractions of the dispersed phase, note that these terms are relative, and within the framework of granular flow it should more be considered high fractions, and even higher fractions. What the granular flow model does is to introduce the important concept of packing limit. Below this limit particles are relatively loosely packed and inter-particle collisions determine their motion, and the collisions are handled as part of the granular temperature model. Above the packing limit, friction between particles dominate their motion and a frictional stress model is used. We have two models for this in Simcenter STAR-CCM+, Solid Pressure Force and Granular Pressure.
The Solid Pressure Force model considers a compaction, or “solid pressure” force as a model for the particle interaction in the solid dispersed phase. It is implemented as an internal force term in the momentum equation for the solid particle phase:
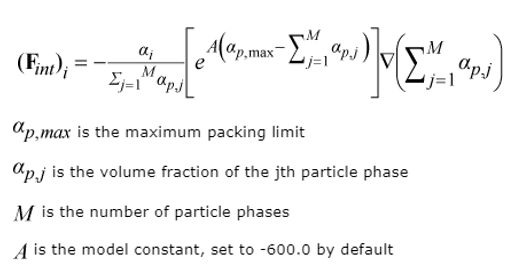
This additional force is coming into effect as the solid volume fraction in any part of the domain approaches the maximum packing limit, by default set to 0.624, representing rigid spherical solid particles. This force then works to resist the formation of unphysical solid packing fractions by increasing exponentially as the solid volume fraction approaches the maximum packing limit. This model is useful when studying multiphase flow containing solids without needing to consider the effect of solid stress due to friction and/or collision.
When this is needed, we instead use the Granular Pressure model. It provides a way to estimate the stresses in a granular medium. If we again consider the application of a fluidized bed, where these models are applicable, we can understand the deduction that the particle motion can be classified into two different regimes, kinetic and frictional.
The animation shows an example of a fluidized bed (with DEM particles and not in the EMP framework), and when the particle velocity are high we find ourselves in the kinetic region and respectively when the particle velocity is lower we find ourselves in the frictional regime. In the kinetic regime the particle motion is governed by collisions between particles. Analogous to gas kinetic theory, after assuming distribution and collision properties for the particle, a kinetic theory of granular pressure can be derived for the individual particle.
In the frictional regime where the particle motion is contact-dominated, empirical formulations are borrowed from soil mechanics. It is possible to work with multiple particle phases of different sizes, when using the Granular pressure model.
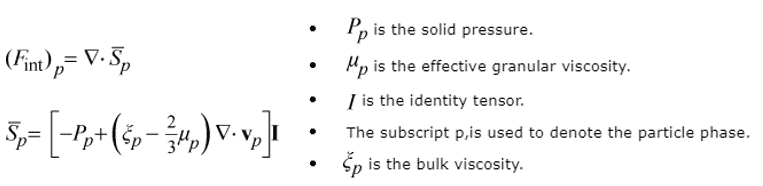
A full stress tensor is obtained that describes the particle-particle interaction force terms in the solid phase momentum equation:
If we consider again our model selection from the generic test case in the beginning we can look in the simulation tree at the selection we have for the granular pressure model. The picture below shows what selection we have, but more importantly what the different options are there to describe.
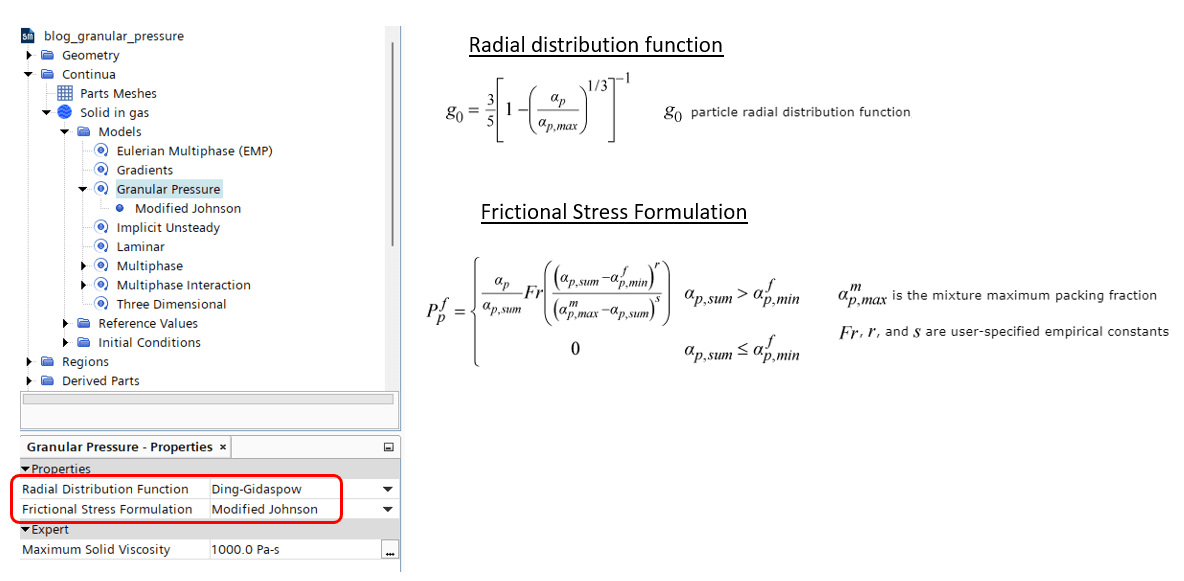
The Particle radial distribution function is used to describe the probability of particle collisions (in the kinetic regime). The function represents the spatial distribution of the particles, their proximity and can be related to the dispersed phase volume fraction. The keen observer can see that the radial distribution function becomes undefined as the particle packing approaches the maximum packing limit. Over a certain critical packing the radial distribution function has a supplementary equation. It is not included here for brevity but can be found in the documentation. The radial distribution function is named Ding-Gidaspow, and it is the only one available in Simcenter STAR-CCM+. It is used in the calculation of the bulk viscosity in the previous picture.
In the frictional regime we need another expression for the frictional stress formulation. Here we have two model options, Modified Johnson and Schaeffer. In the picture we can see the Modified Johnson model. When the packing of particle are high enough the Modified Johnson model is activated, and it calculates the frictional solid pressure.
Note that for brevity and to not make the references too complicated we have skipped the Granular temperature model in this post. In reality granular temperature, granular diffusion coefficients and the effective granular viscosity are calculated using additional models. They might be treated in a later blog post but can as usual be found in the documentation.
I hope this blog post has given you a notion on how to treat dispersed solid particles in a continuous phase, moreover how the complexity increases as the volume fraction of the dispersed phase increase. As usual, reach out with any question to support@volupe.com.
Author

Robin Victor
+46731473121
support@volupe.com