The 2025 year’s releases of Simcenter STAR-CCM+ included some substantial improvements for the Smoothed Particle Hydrodynamics (SPH) solver, and one of the most exciting ones may be the compatibility with the Dynamic Fluid-Body Interaction (DFBI) motion. With this addition the application coverage for SPH is hugely increased, as you can now model kinematics and multi body motions, as well as fluid force induced motion.
How to use it
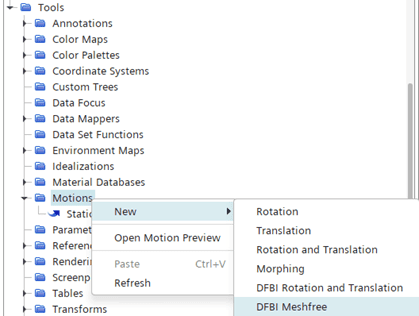
The functionality is enabled through the new motion called DFBI Meshfree which was first introduced in the 2506 release. As with all other motions, the DFBI Meshfree motion can be found under Tools -> Motions, see below.
Kinematic motions
The first improvement was the compatibility with the kinematics solver (an extension of the DFBI module). With this capability you can model kinematic body interactions such as planetary and differential gears. This simplifies the setup of such systems, since you can impose the motion through joint body couplings and only need to prescribe the rotational speed of the main gear (or driving shaft). Below is an example showing a planetary gear along with an SPH flow solution.
The rotational speed of the gears can also be ramped. Either linearly, or through an S-curve implementation.
Multi Body Motions
The motion capabilities were improved even further with the release of 2510, when the multi body motion solver (another extension of the DFBI module) was included for SPH. This compatibility enabled interdependent motion of 6-DOF bodies, with support for e.g. mechanical joints, body contacts and motion due to fluid forces. To exemplify body contacts compatibility we can consider a case with a tire rolling across the road. Below is an example showcasing such a scenario.
The inclusion of the multi body motion solver also means that you have access to the velocity driver and rotation driver body constraints for the SPH DFBI Meshfree motion.
Motion due to fluid forces
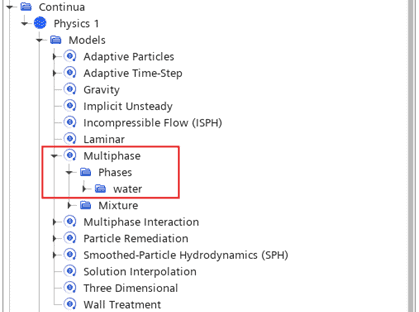
To exemplify a motion due to fluid forces with the SPH solver, we will revisit a case that we wrote about a while back when we introduced Virtual Body with DFBI in Simcenter STAR-CCM+ (Virtual Body With DFBI In Simcenter STAR-CCM+ – And How To Include Prism Layers In Your Virtual Body Motion – Volupe.com). Just like in that article, we will let a rubber duck float around in a kitchen sink while we pour water from the faucet – except this time we will do it using the SPH model along with the DFBI Meshfree motion. In SPH, the free surface is defined by the Lagrangian framework of particles. Zero pressure is enforced at the free surface due to the absence of particles in the gas phase, eliminating the need for explicit free surface definition. Any point with an incomplete neighborhood of liquid particles is then automatically identified as near the free surface. This means that although the SPH model is categorized as a Multiphase model, there is actually only one phase defined in the setup – the liquid.
Another distinct difference with this approach from the Virtual Body + DFBI + VOF approach described in the previous article, is that the Lagrangian description eliminates the need for a volume mesh. This means that there is no need for virtual bodies, overset or any other internal interfaces to facilitate the motion. The rubber duck is simply defined as a 6-DOF DFBI body and then treated as a dynamic boundary by the fluid. Below you can see a rendering example from this setup using SPH and DFBI Meshfree motion.
I hope you find these new features interesting. As always, please send any comments or questions to support@volupe.com.
Author

Johan Bernander, M.Sc.